Assemblage esieabot 2024 et 2025
Inventaire des pièces
Image |
Description |
Image |
Description |
|---|---|---|---|
|
|
||

|
Connecteur 40 pins |
|
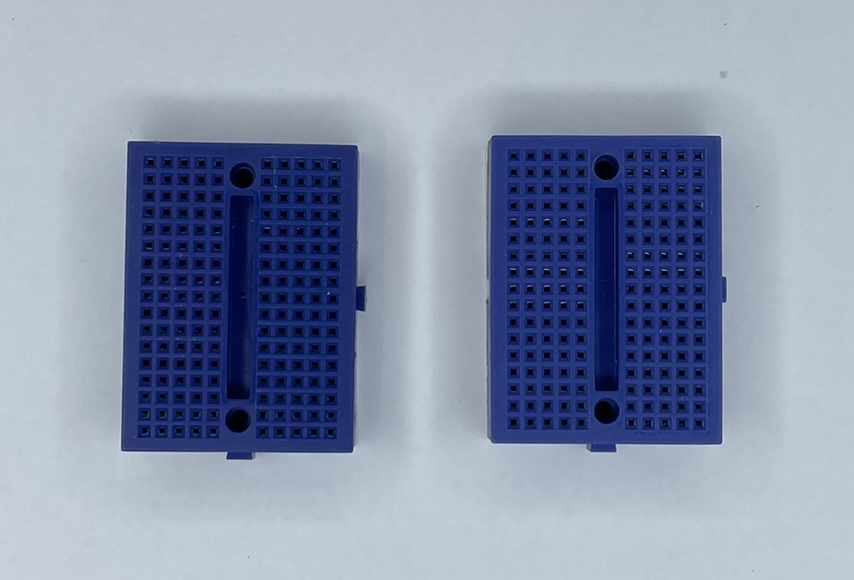
2 breadboards |

|
Câble USB-C vers Micro-USB |
|
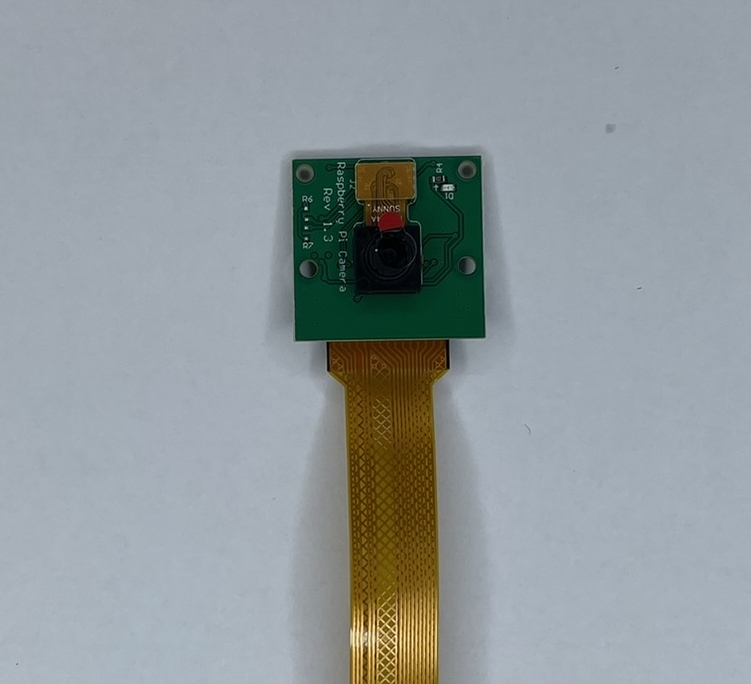
Caméra avec nappe de connexion |
|

|
Ecran OLED |
|

|
|
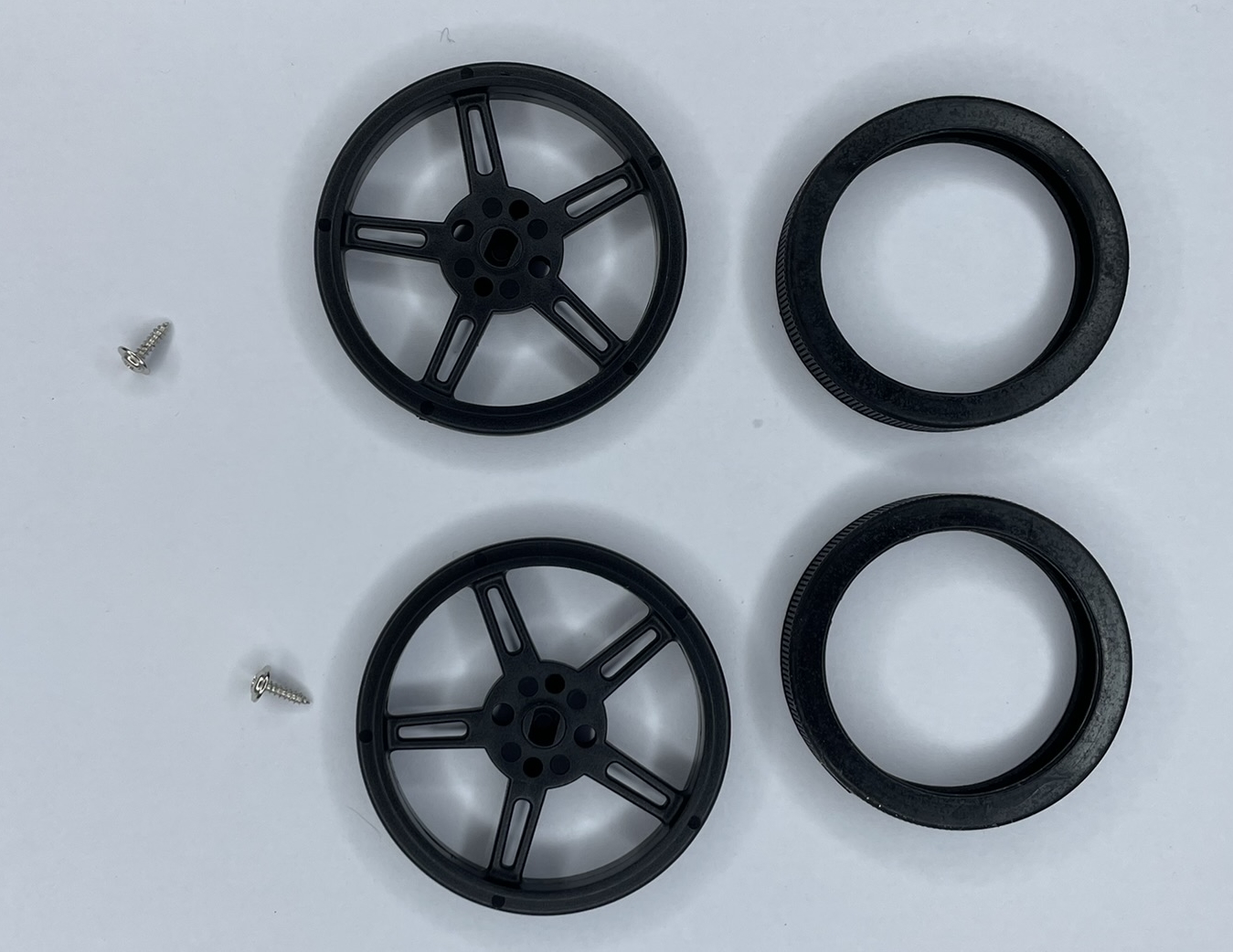
2 roues avec pneus et vis |
|
|
|
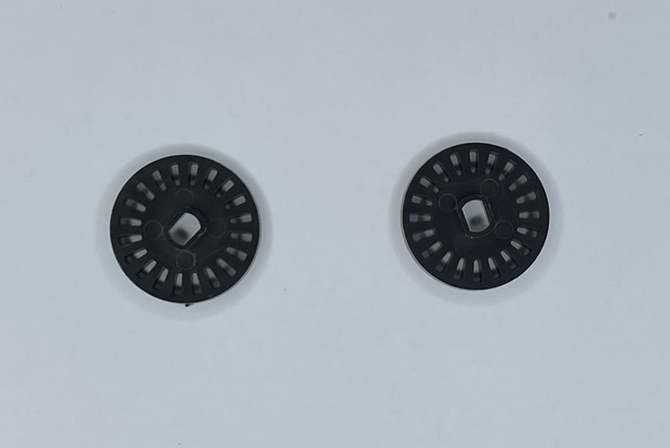
2 disques codées |
|
|
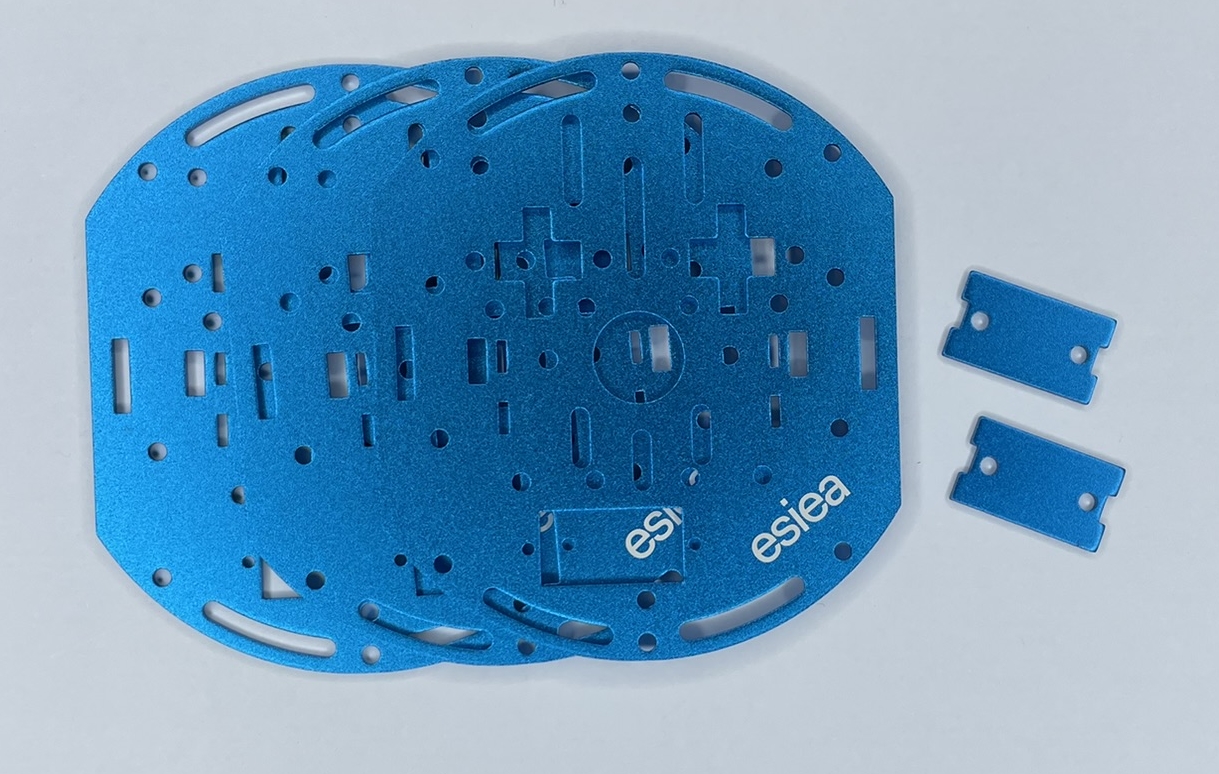
3 plaques de chassis et 2 supports moteurs |

|
3 vis M3 en nylon |

|
Roue libre avec 2 vis et boulons |

|
Câble JST bleu ou blanc |

|
Manette sans fil |

|
Dongle USB pour manette sans fil et adaptateur |

|
Carte micro SD 16 ou 32 Go |

|
Lecteur micro SD USB-C |

|
7 grandes entretoises M3 avec vis |

|
6 petites entretoises M2.5 avec vis |

|
2 grandes vis M3 avec boulons |

|
4 vis M2.5 avec boulons |

|
6 vis M2 avec boulons |

|
Lot de serre-câbles |

|
8 longs fils femelle-femelle |
|
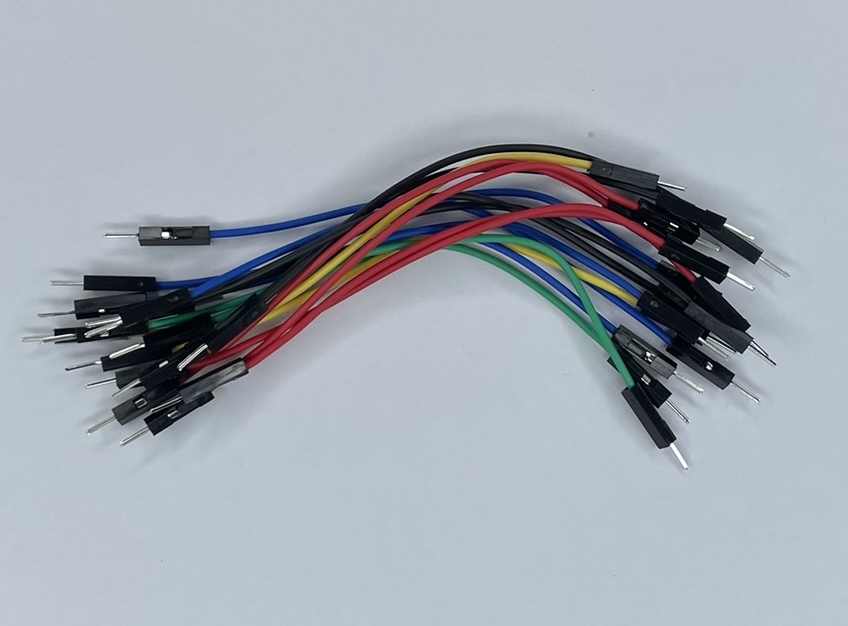
Lot de fils mâle-mâle |

|
Lot de fils femelle-femelle |
|
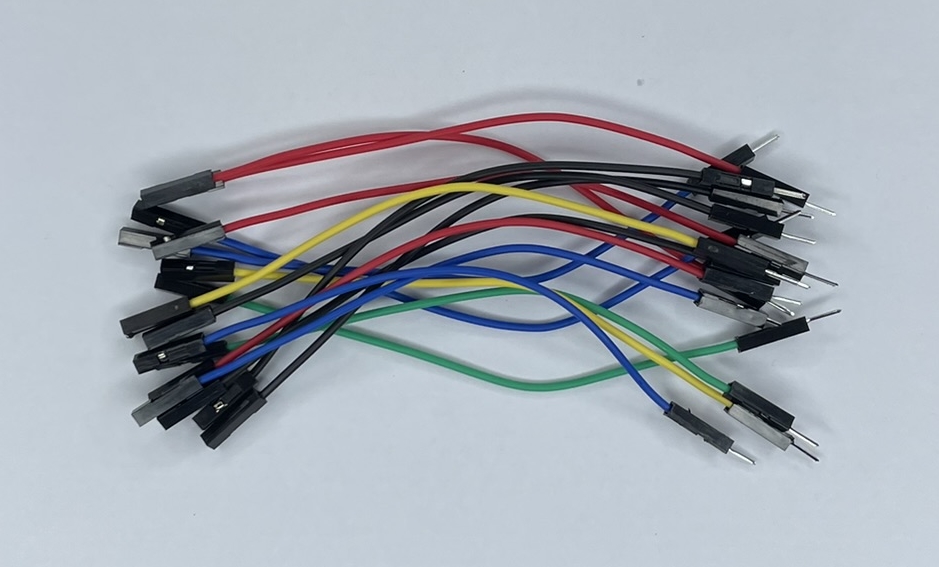
Lot de fils mâle-femelle |

|
Mini tournevis |
|
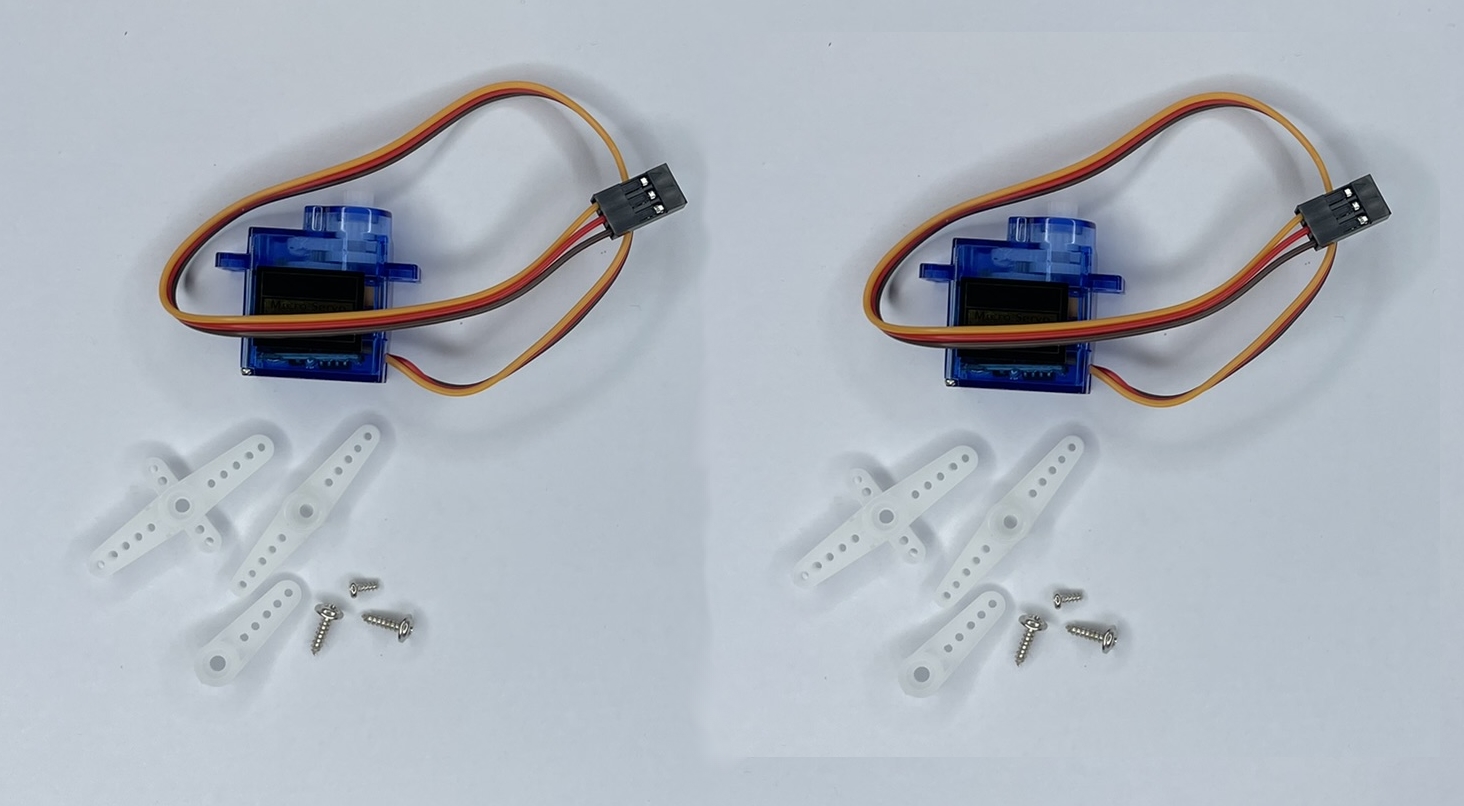
2 servos-moteurs avec accessoires |
Etape 0
Avertissement
Avant de commencer, assurez-vous d’avoir toutes les pièces nécessaires à l’assemblage, référez-vous à la liste des pièces ci-dessus.
Lisez attentivement le texte de chacune des étapes, ne vous fiez pas uniquement aux images.
Il est normal qu’il vous reste des pièces à la fin du montage. Suivez précisement les étapes, ne rajoutez pas de vis si elles ne sont pas indiquées.
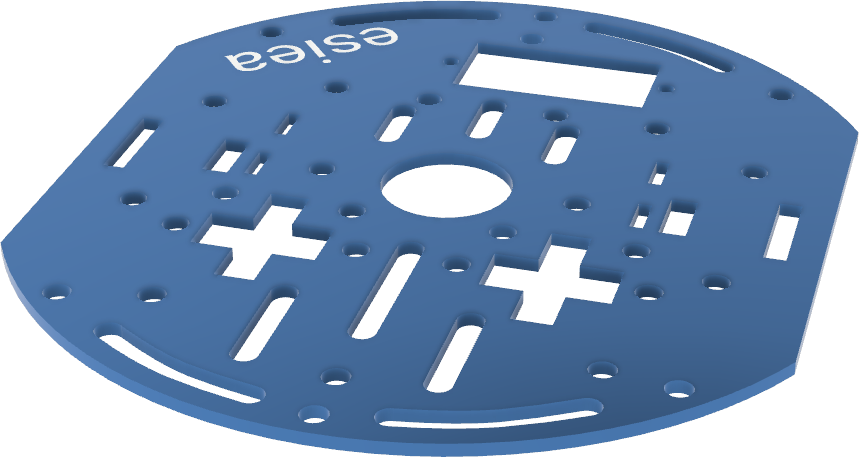
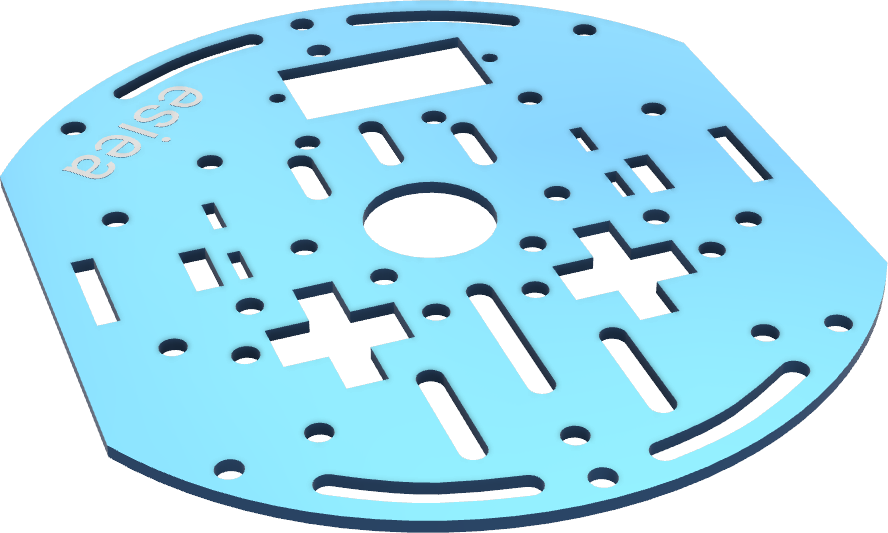
Le sens des plaques du chassis est important car elles ne sont pas symétriques. Fiez vous au positionnement du logo ESIEA pour vous repérer.
Etape 1
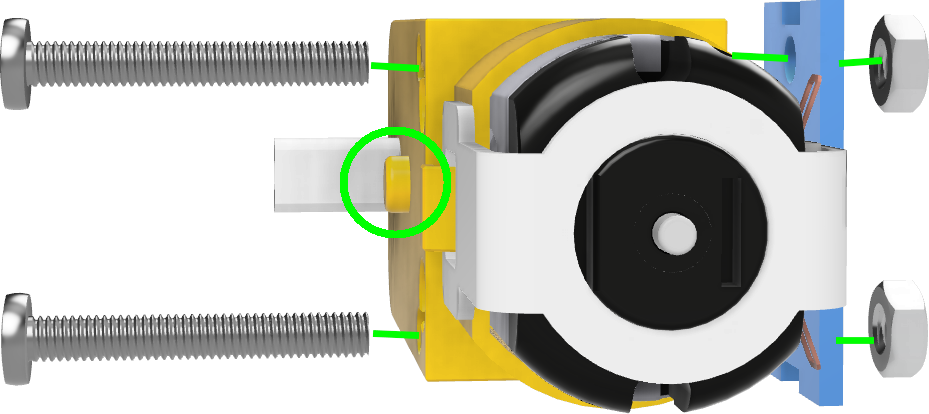
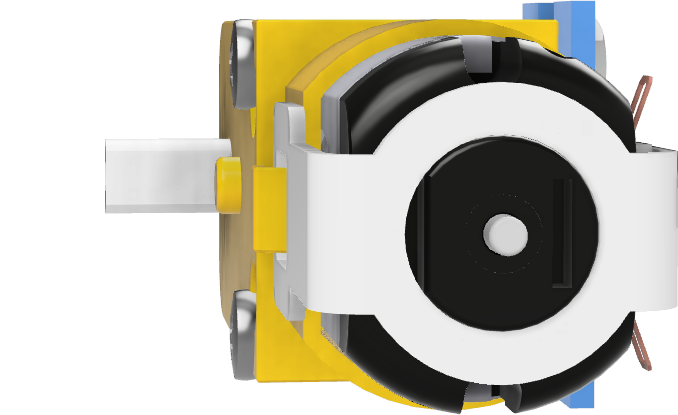
Prendre un moteur et y visser son support en métal avec 2 grandes vis M3 et leurs boulons.
Avertissement
Attention, le sens du moteur est important car il n’est pas symétrique. Pour vous repérer, vérifiez l’emplacement du détrompeur entouré sur l’image.
Etape 2
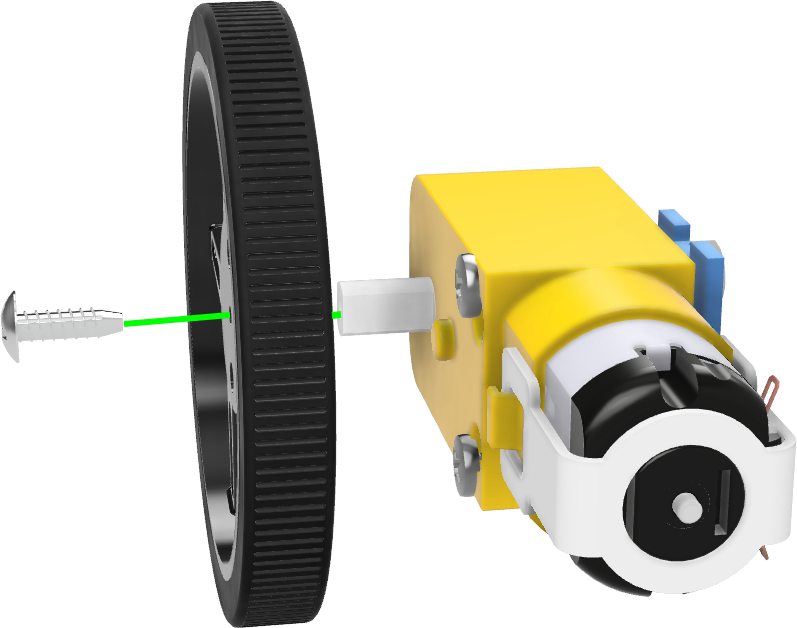
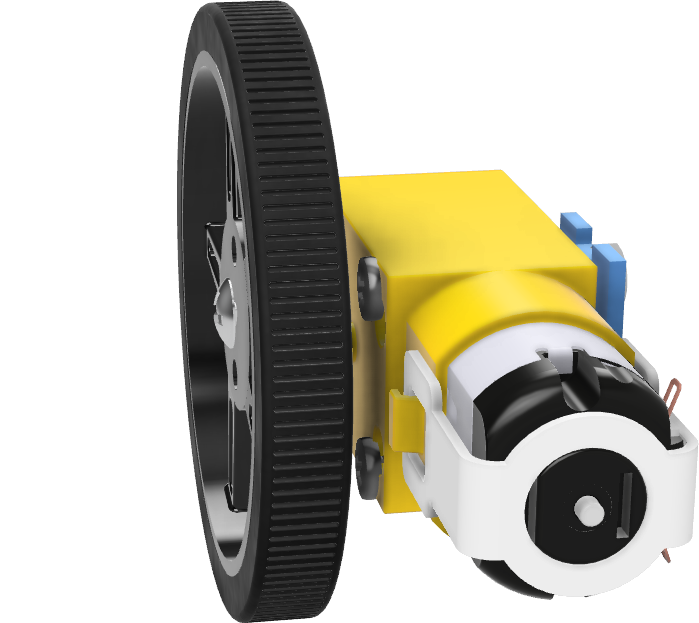
Visser la roue et son pneu au moteur grâce à une vis auto foreuse.
Etape 3
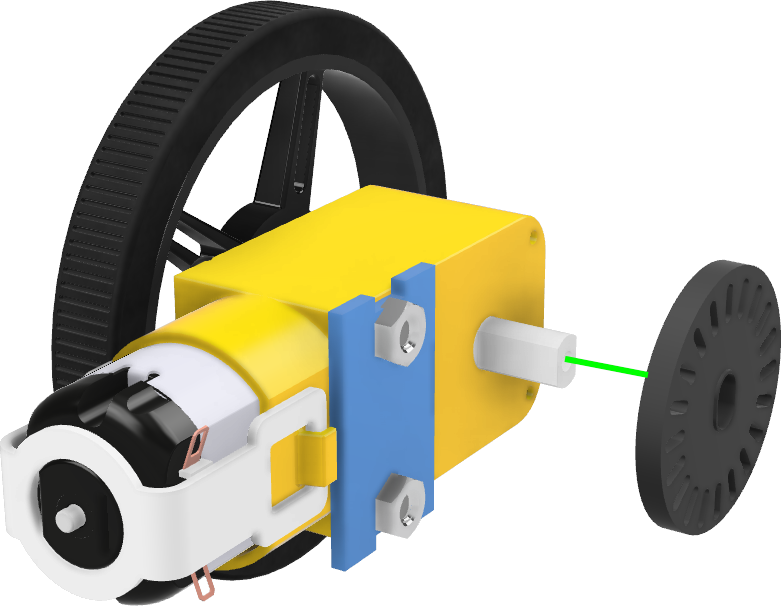
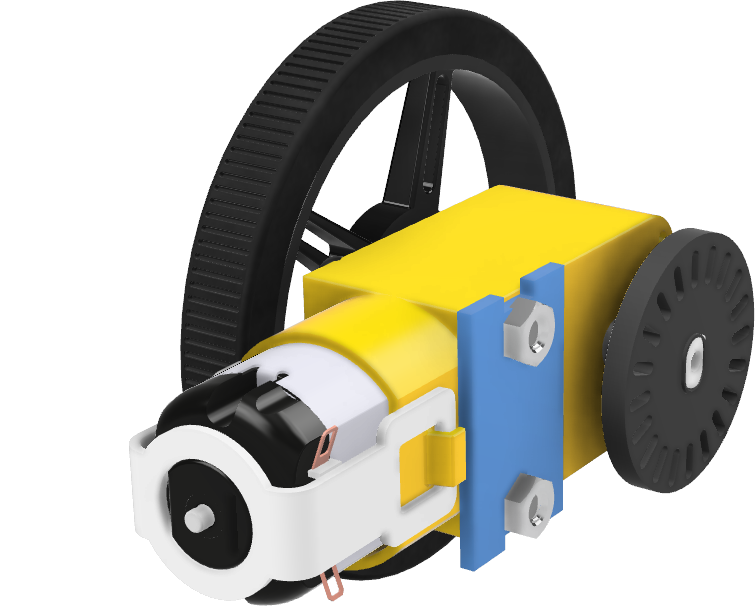
Positionner le disque du capteur de vitesse de l’autre côté du moteur. Le bord du disque doit arriver au bord de l’axe commme sur l’image.
Etape 4
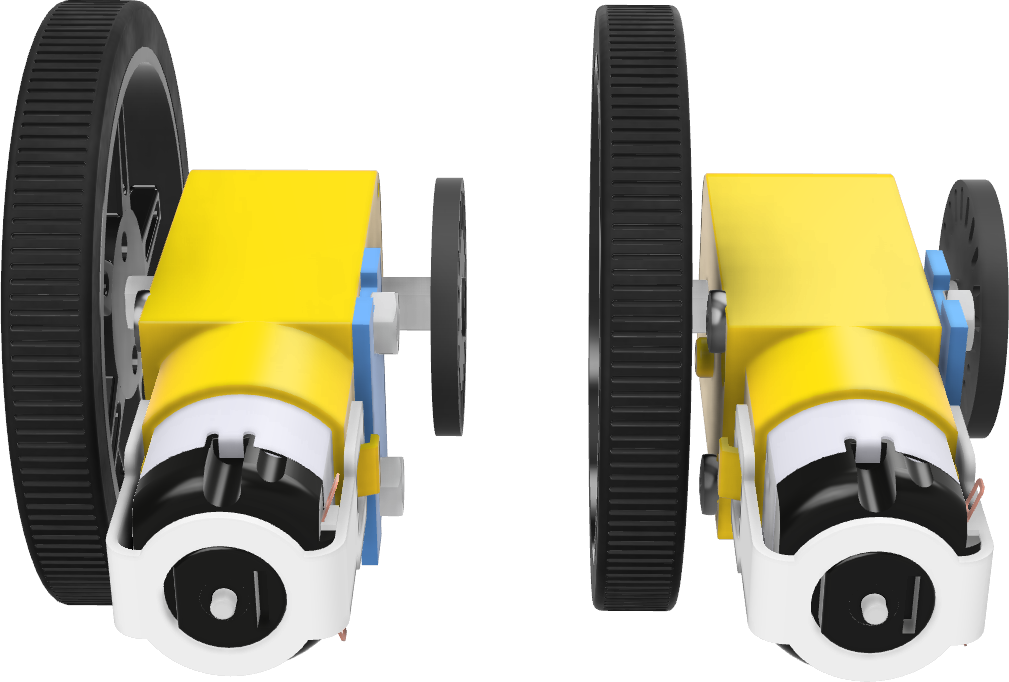
Répeter les étapes 1 à 3 pour le second moteur de manière strictement identique.
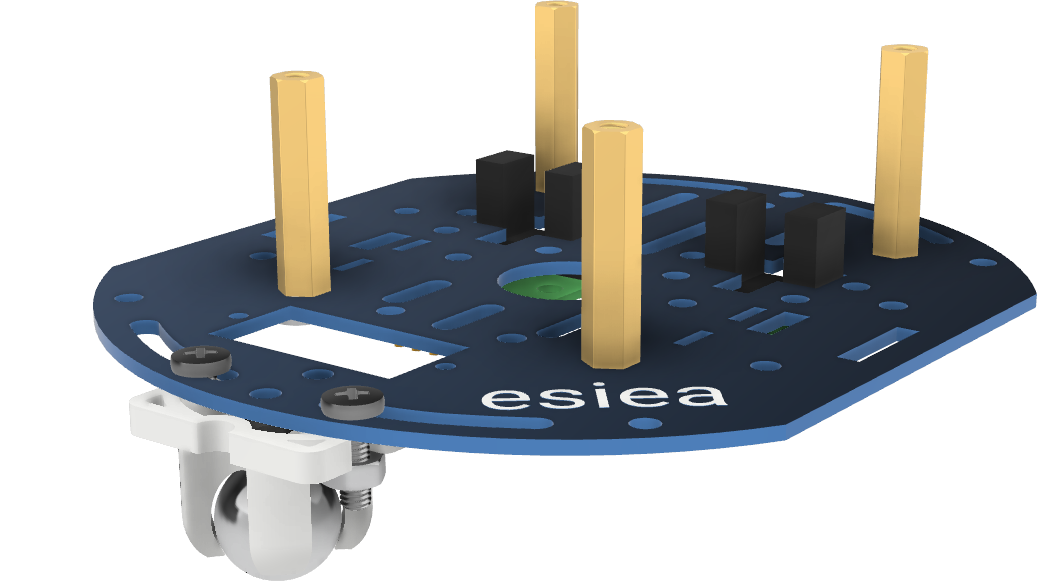
Etape 5
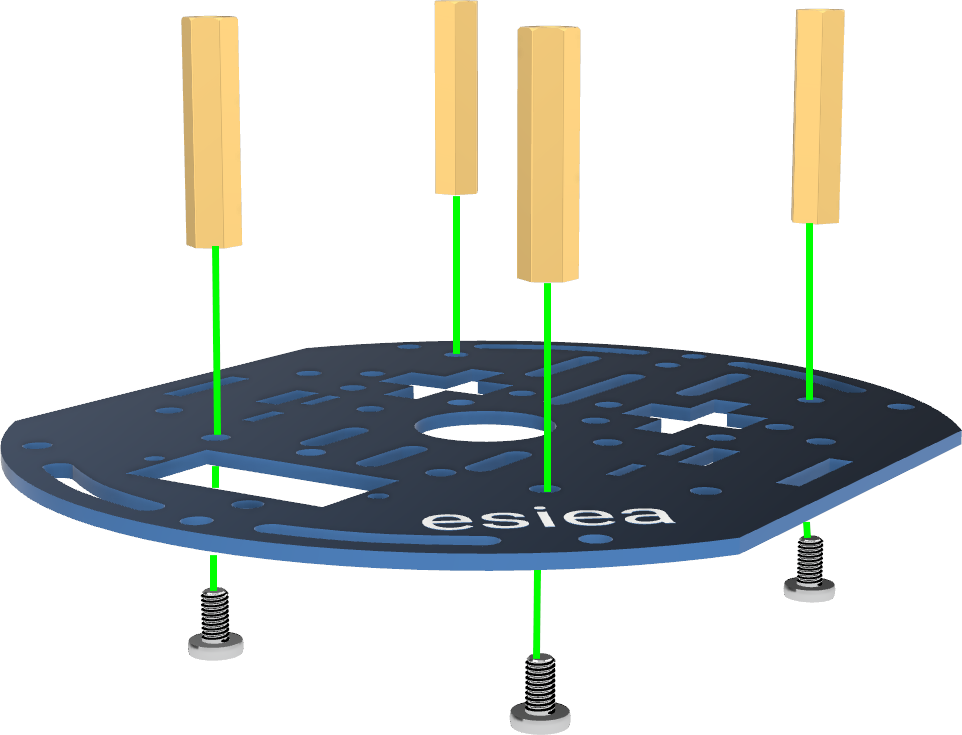
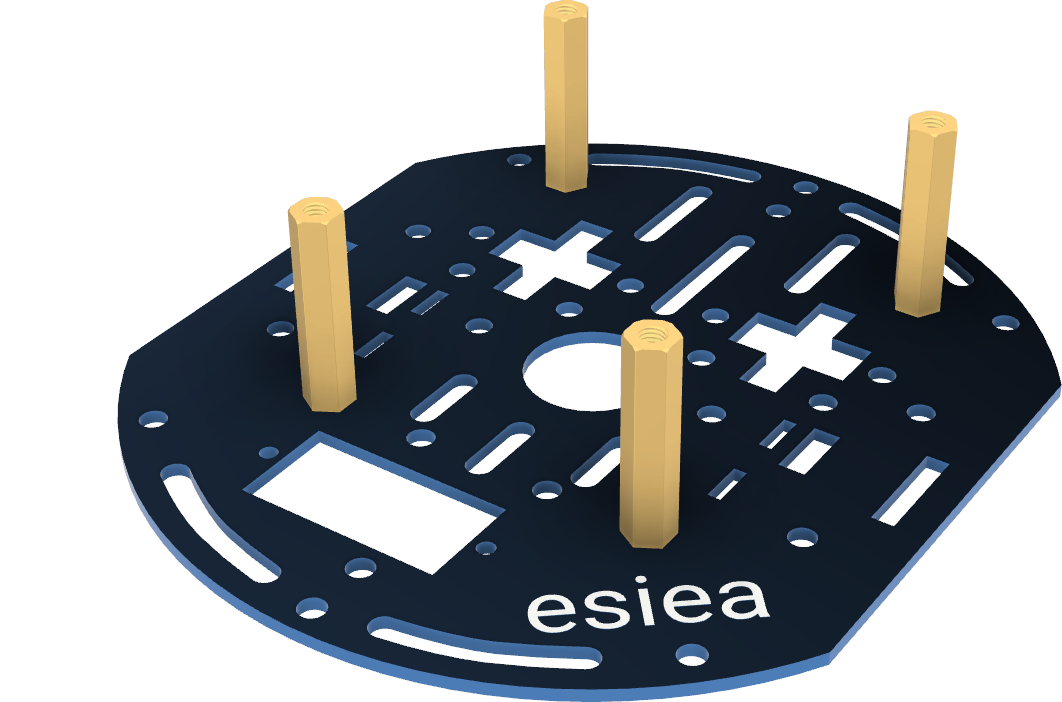
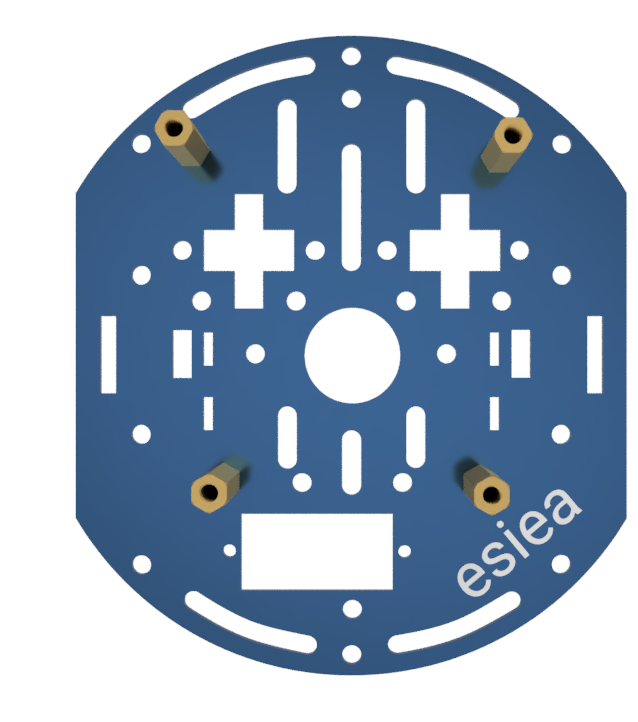
Prendre une plaque de chassis et y visser 4 grandes entretoises M3 avec leurs vis respectives aux emplacements indiqués.
Etape 6
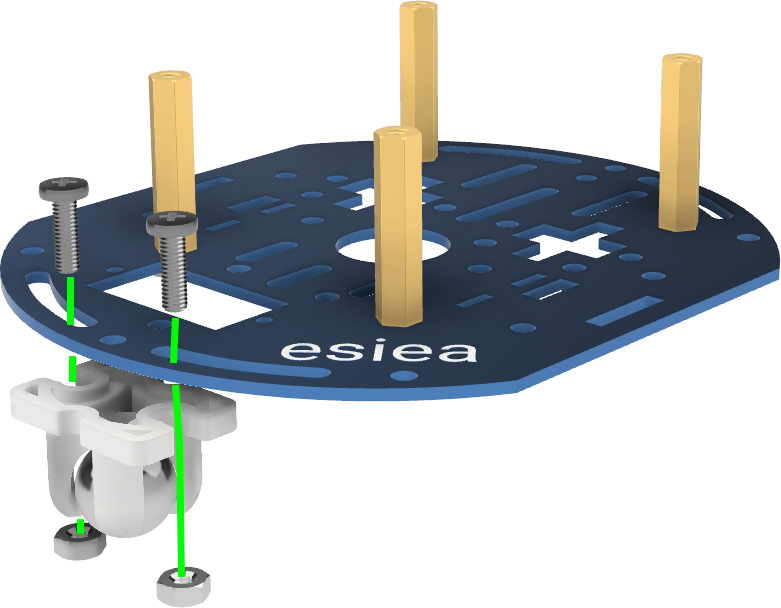

Visser la roue libre à l’aide des vis et boulons M3 fournis à l’emplacement indiqué.
Note
Il peut être plus simple pré-visser les boulons sur le chassis avant d’insérer la roue libre et de sérer complètement.
Etape 7
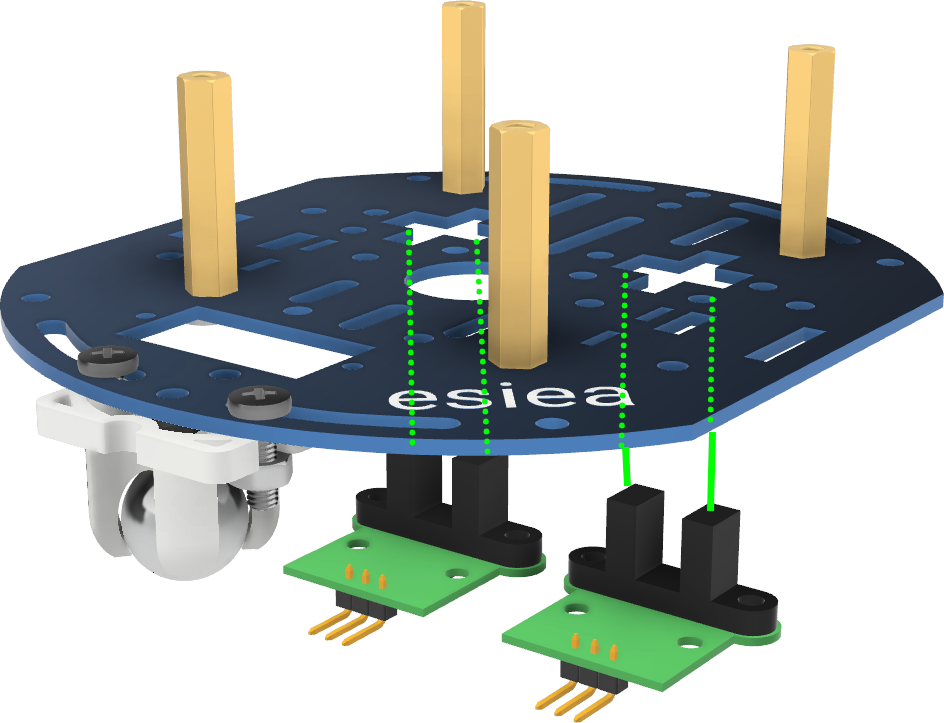
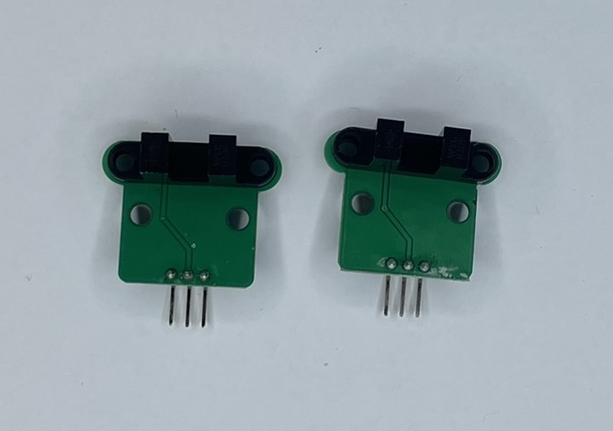
Positionner les capteurs de vitesse aux emplacements indiqués sur le chassis.
Etape 8
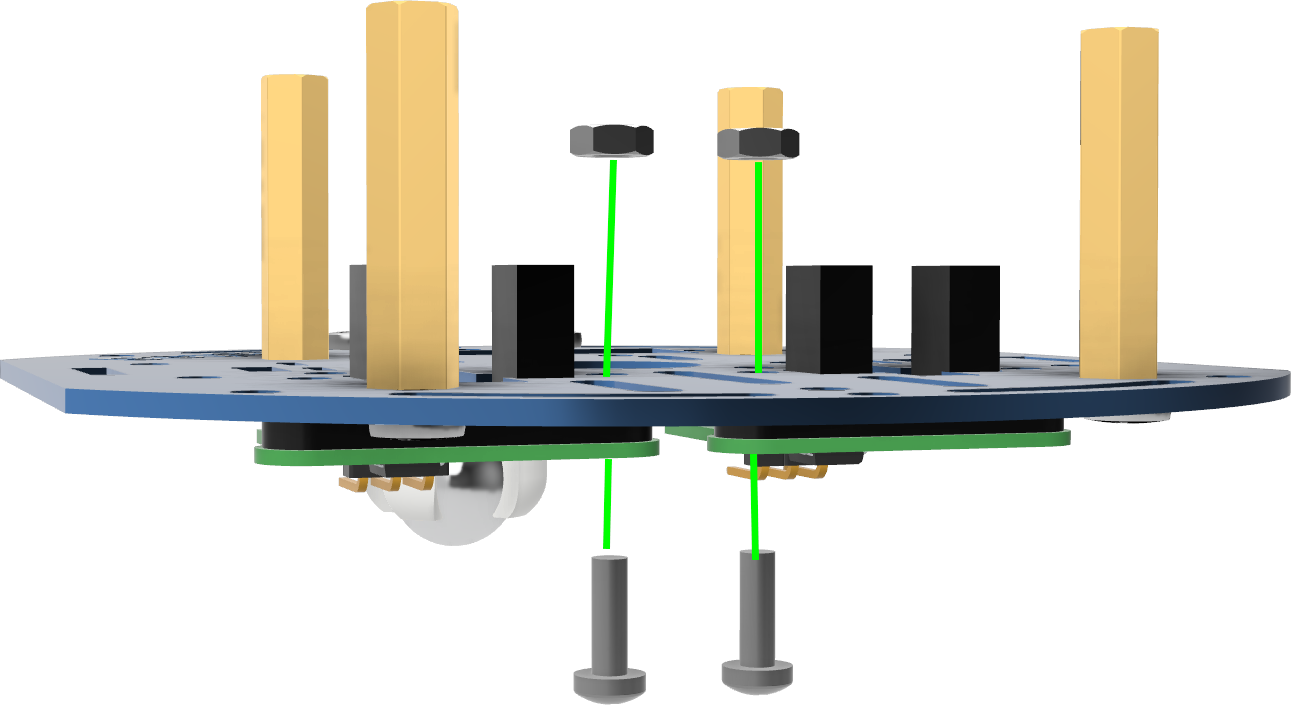
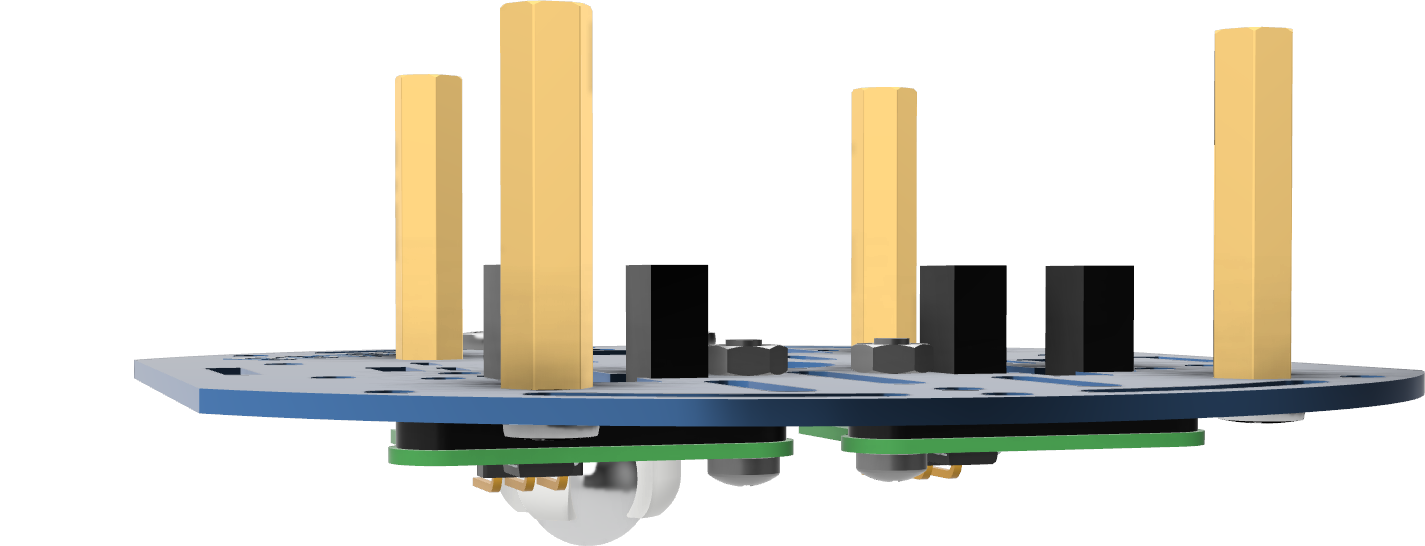
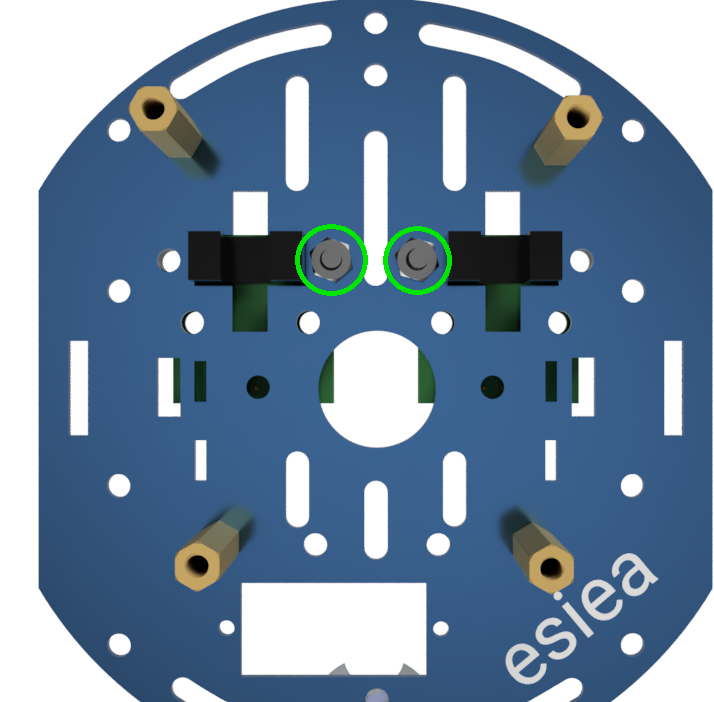
Visser les capteurs de vitesse à l’aide de 2 vis et boulons M2.5.
Etape 9

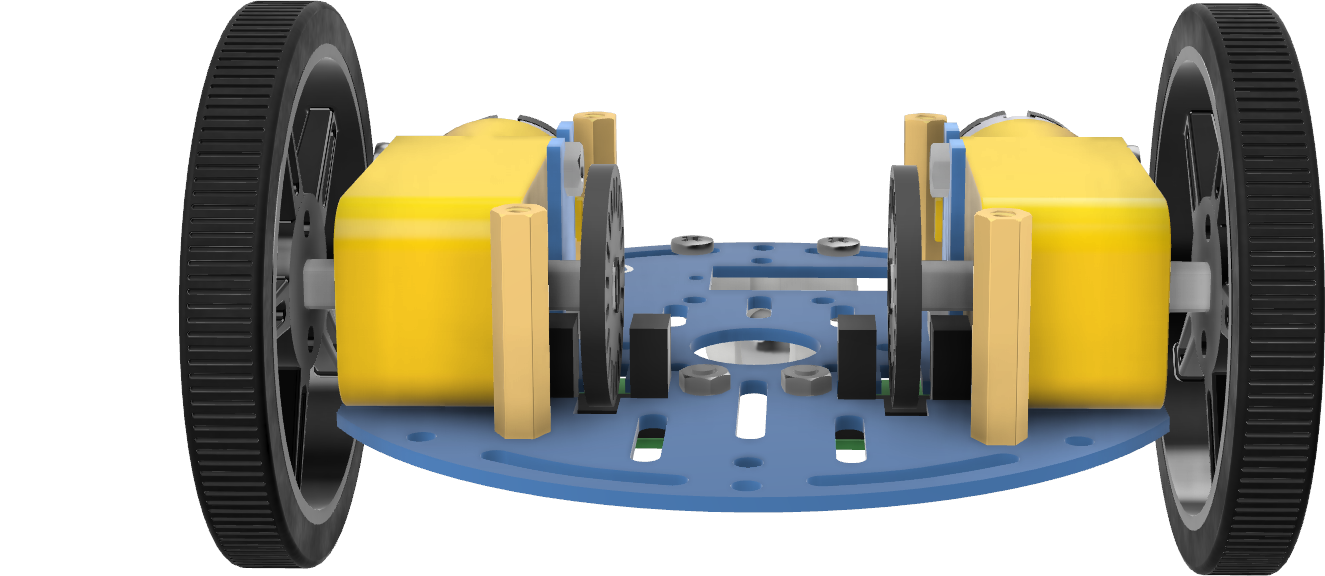
Positionner les moteurs sur le chassis à l’emplacement indiqué. Les supports en métal de chaque moteur doivent être positionnés aux encoches dédiées sur le chassis. Si besoin, vous pouvez ajuster la position des disques des capteurs de vitesse pour qu’ils soient bien centrés sur les capteurs.
Etape 10
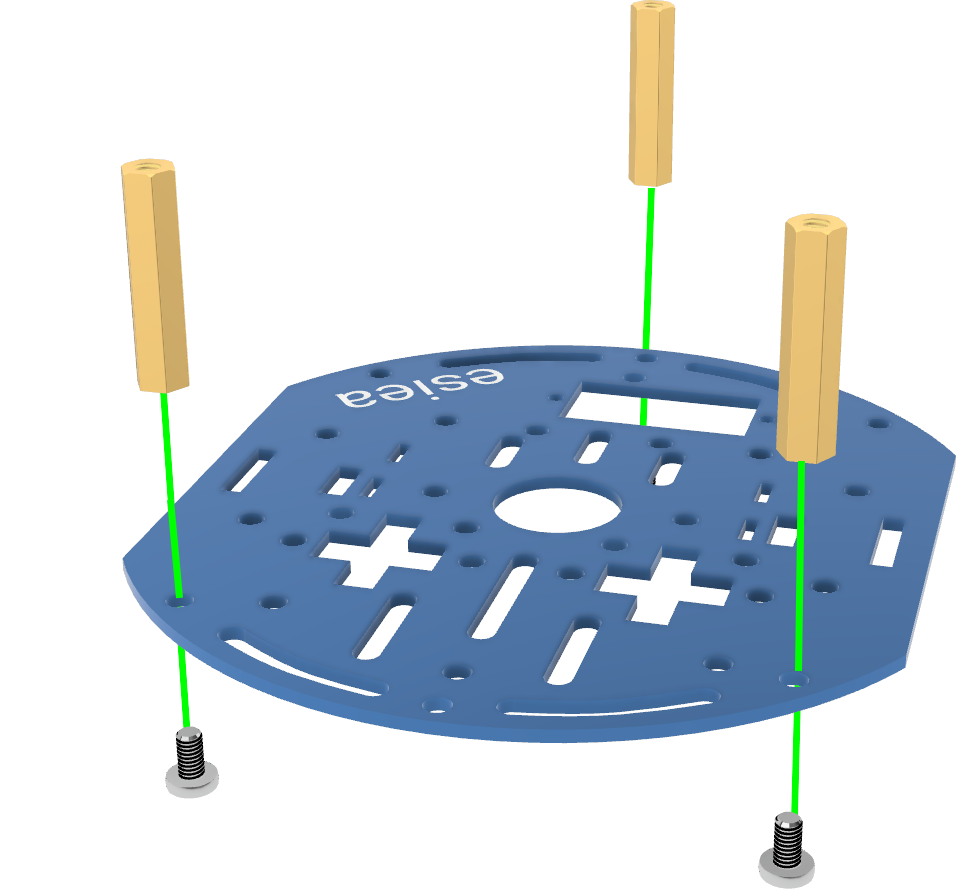
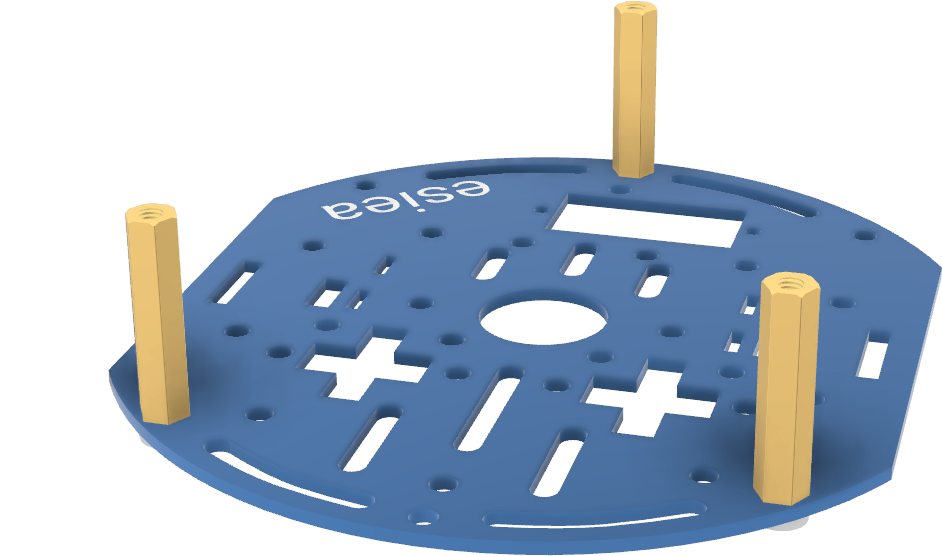
Prendre une nouvelle plaque de chassis et visser 3 grandes entretoises M3 avec leurs vis respectives aux emplacements indiqués.
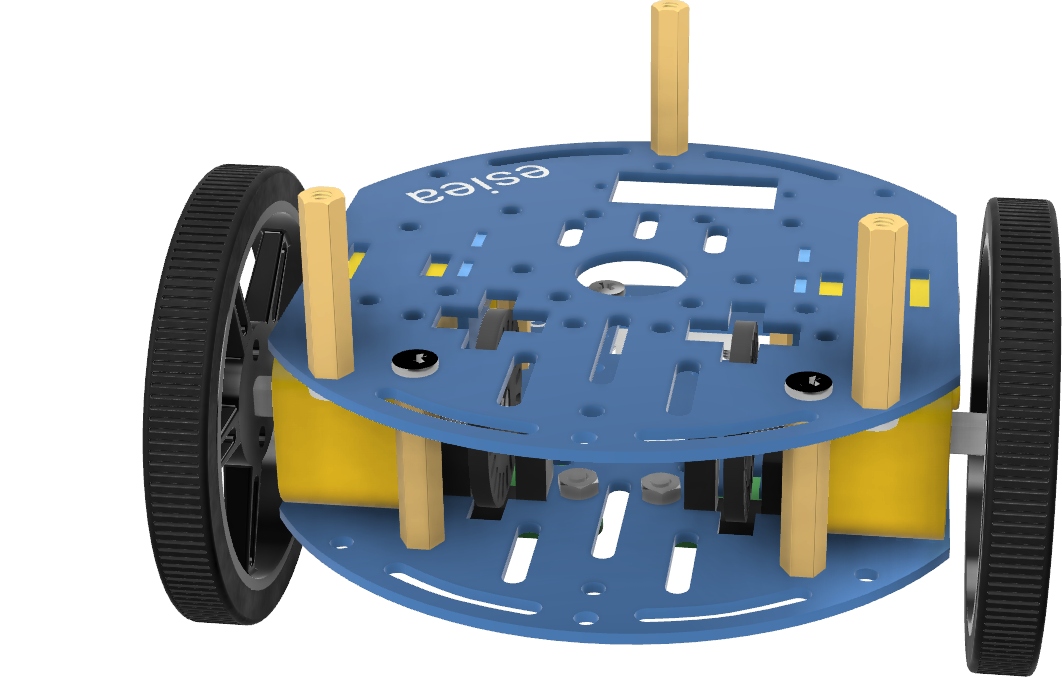
Etape 11
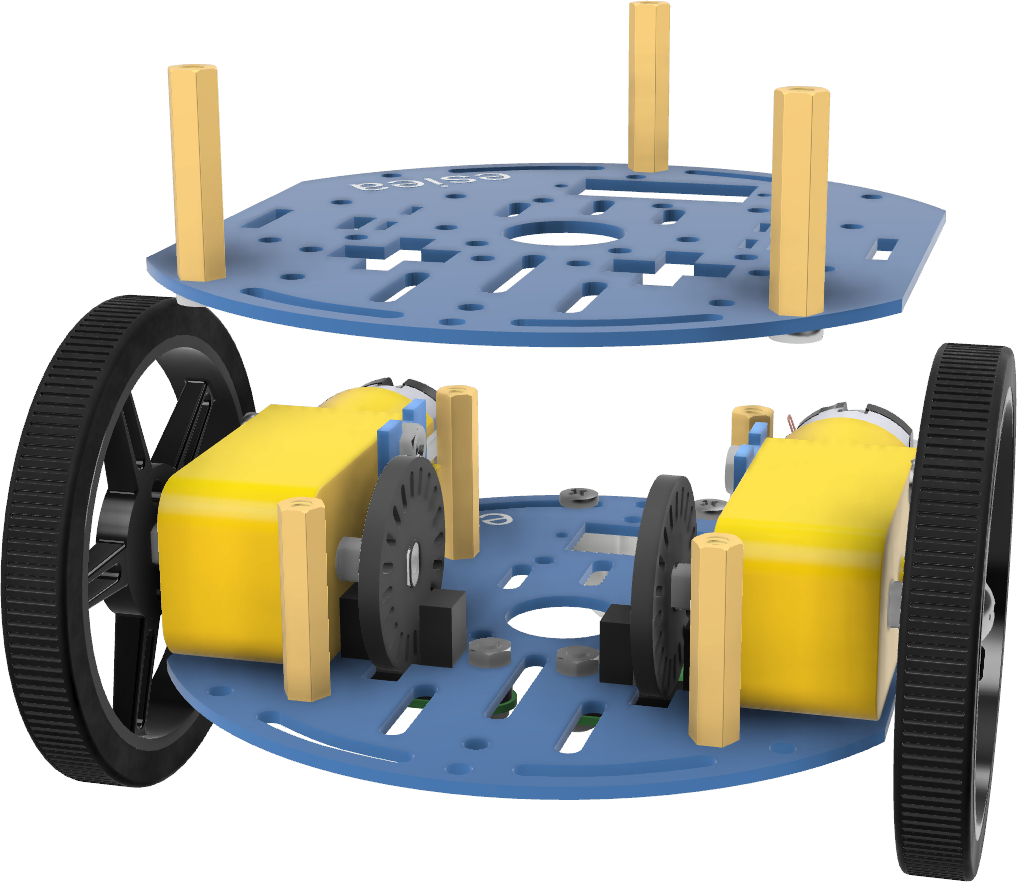
Positionner la nouvelle plaque de chassis sur la précédente à l’emplacement indiqué. Les supports en métal des moteurs doivent à nouveau être positionnés aux encoches dédiées sur le chassis.
Note
Si besoin, vous pouvez pousser légèrement les moteurs pour les positionner correctement. Il peut être plus simple de d’abord aligner un premier moteur entre les deux plaques et dans un second temps de pousser sur le second moteur pour le positionner.
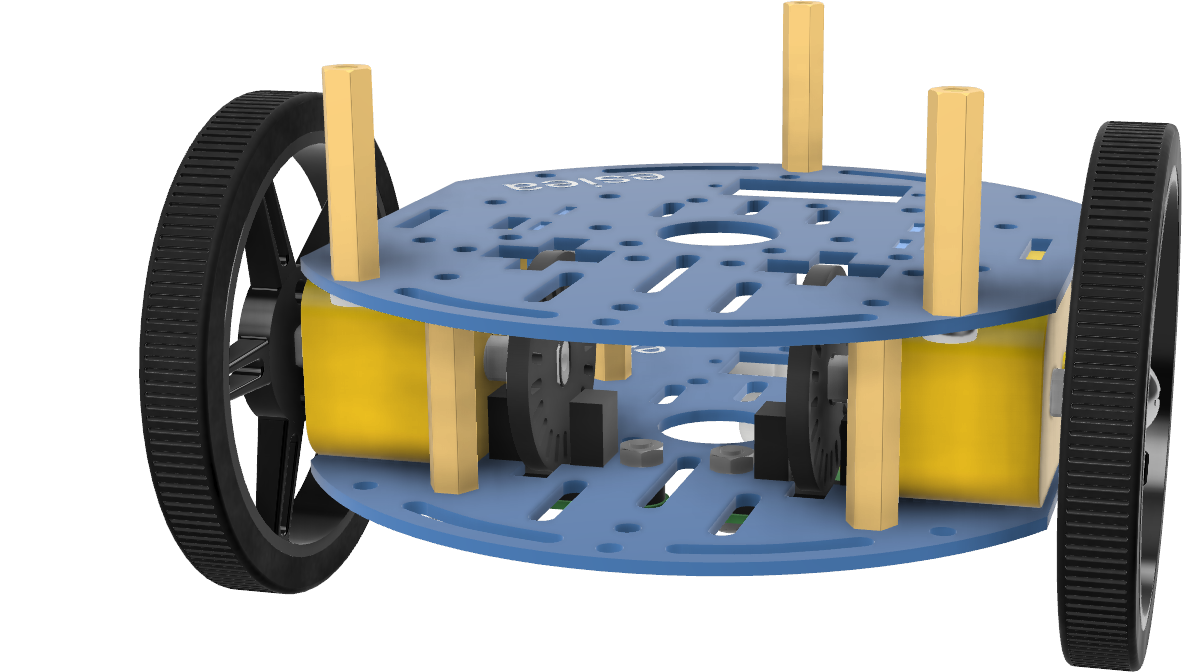
Etape 12
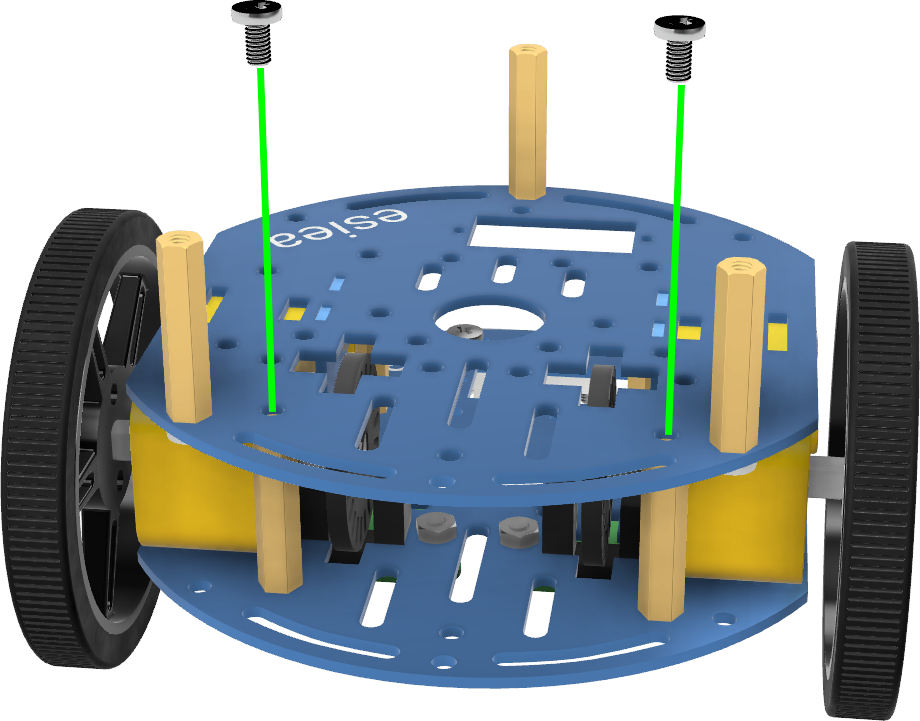
Visser la nouvelle plaque de chassis à la précédente à l’aide de 2 vis M3 aux emplacements indiqués.
Note
Il n’y a que 2 vis à mettre, c’est normal. Les 2 autres vis seront utilisées pour fixer la power board plus tard.
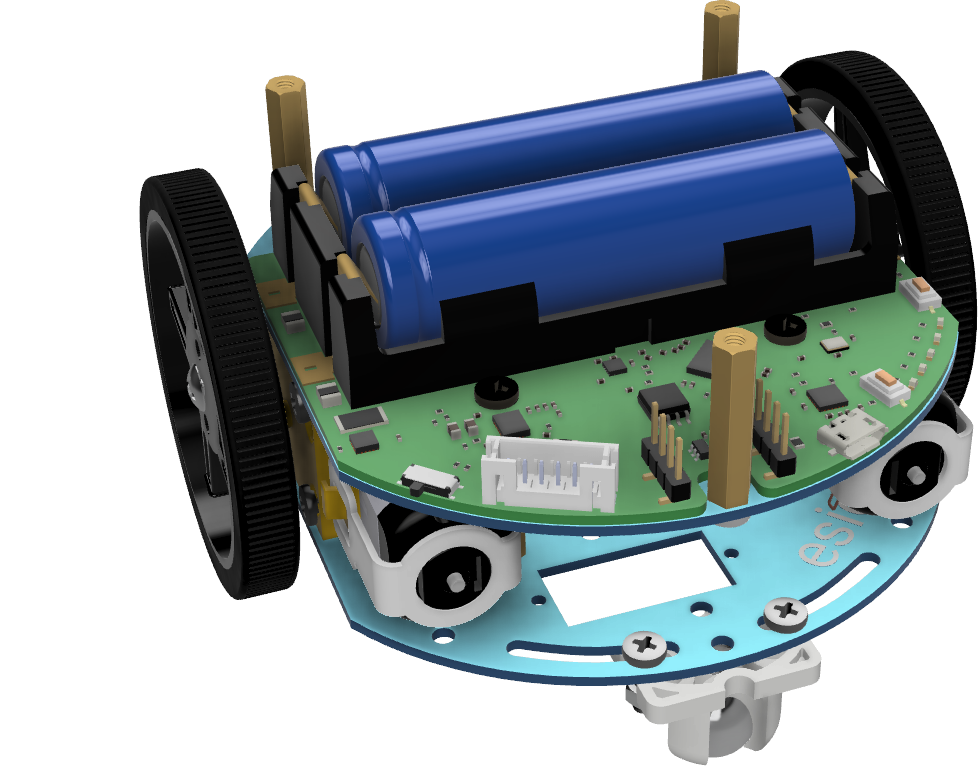
Etape 13
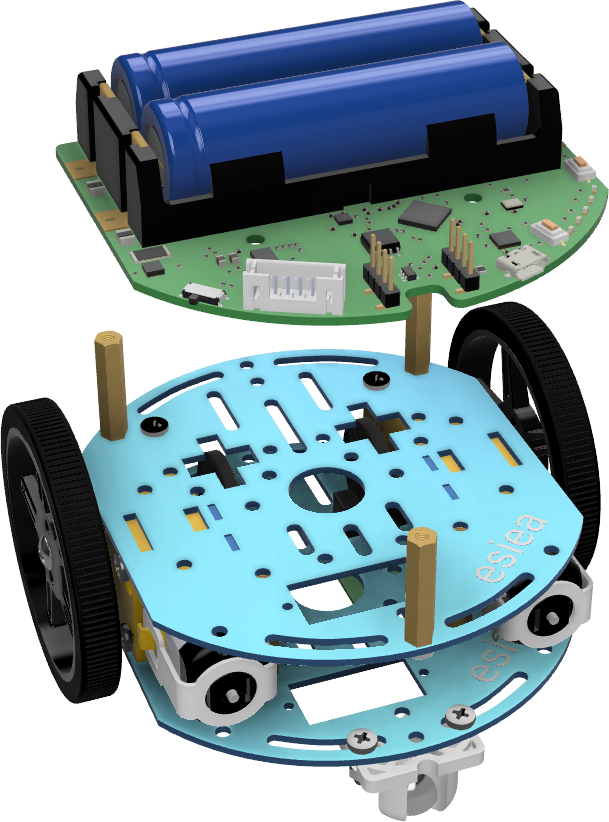
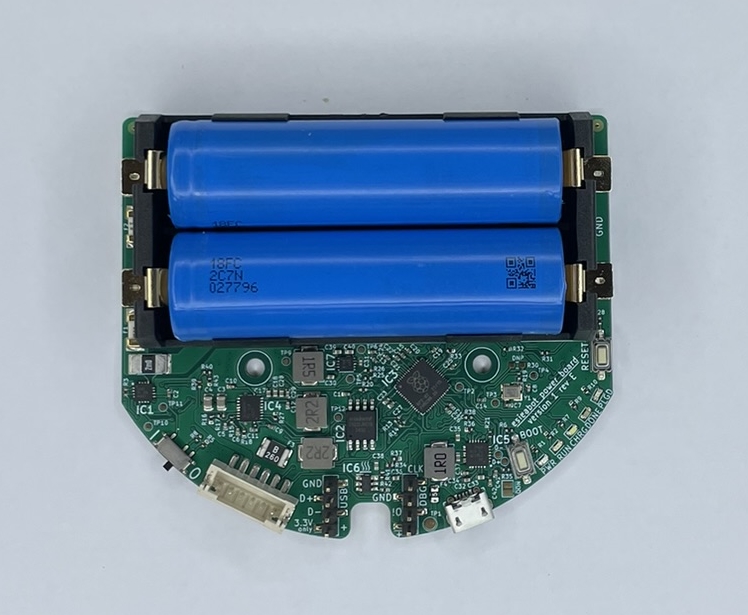
Positionner la power board à l’emplacement indiqué.
Avertissement
Attention, même éteinte, la power board reste alimentée. Il ne faut donc pas qu’elle rentre en contact avec des pièces métalliques comme des vis.
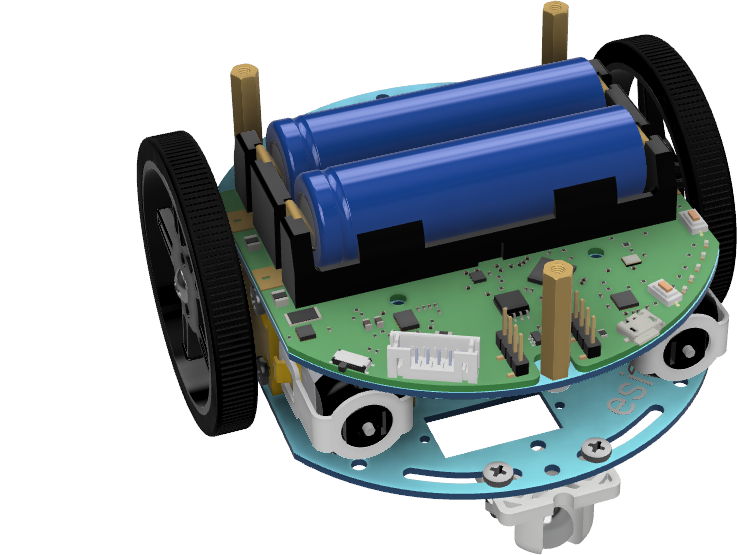
Etape 14
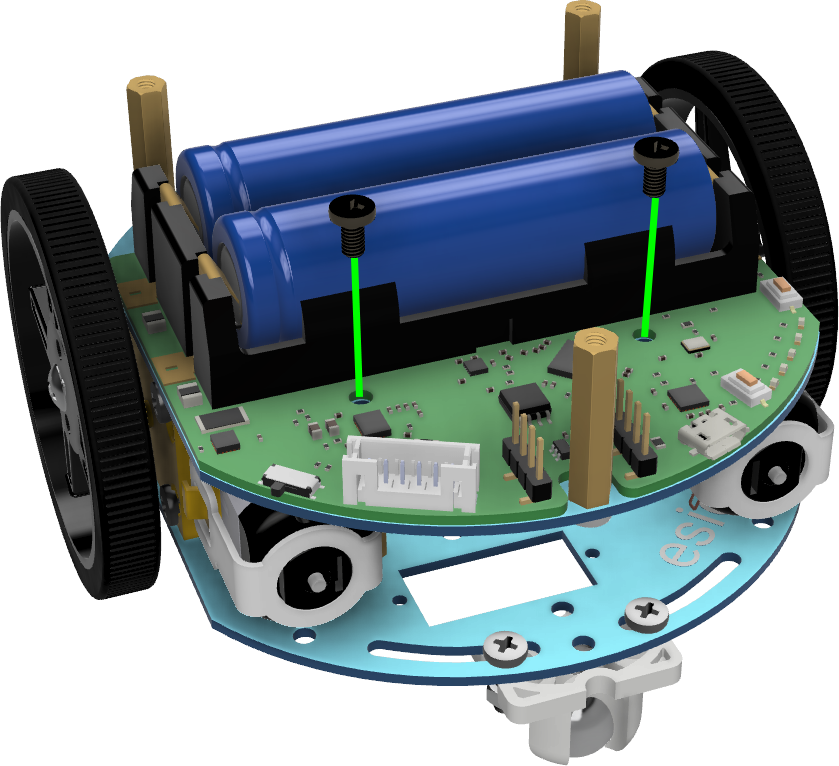
A l’aide de 2 vis M3 en nylon noir, visser la power board au chassis.
Avertissement
Attention, comme la power board reste alimentée même éteinte, il est important d’utiliser des vis en nylon pour éviter tout court-circuit en cas de chute accidentelle. De même, faites attention à ce que votre tournevis ne touche pas les composants de la power board.
Note
A cette étape, vous pouvez également brancher le câble JST à la power board pour ne pas devoir le faire ensuite. Pour rappel, ce cable peut être blanc ou bleu.
Etape 15
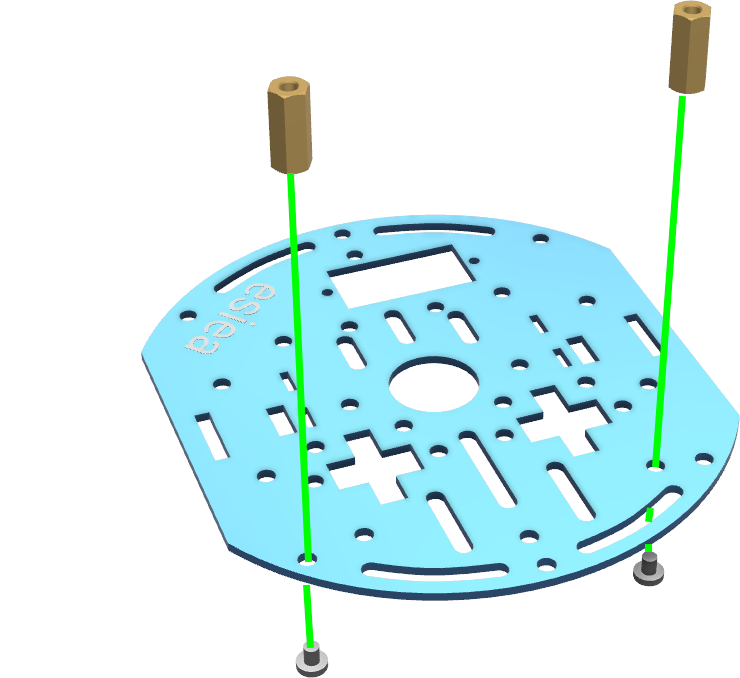
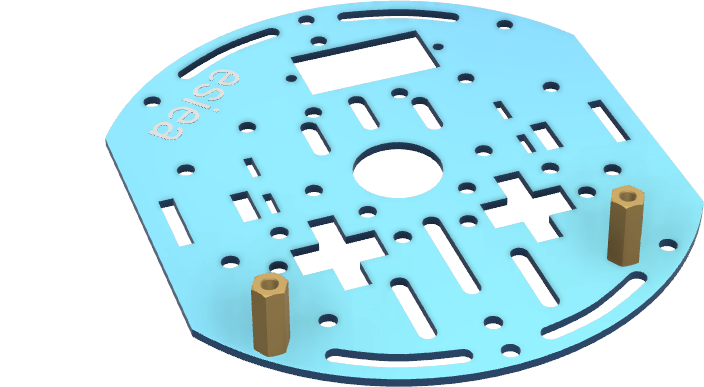
Prendre une nouvelle plaque de chassis et visser 2 petites entretoises M2.5 avec leurs vis respectives aux emplacements indiqués.
Avertissement
La position des entretoises est très imporantes, faites attention à l’orientation de la plaque en métal et à la position des trous.
Note
Si vous avez une tourelle caméra, vous devriez l’assembler avant de continuer. Pour cela, rendez-vous dans la section Assemblage tourelle 2021 et 2022. Vous ne devez suivre que les étapes 1 à 6. Le branchement des servos-moteurs sera fait plus tard sur l’add-on board.
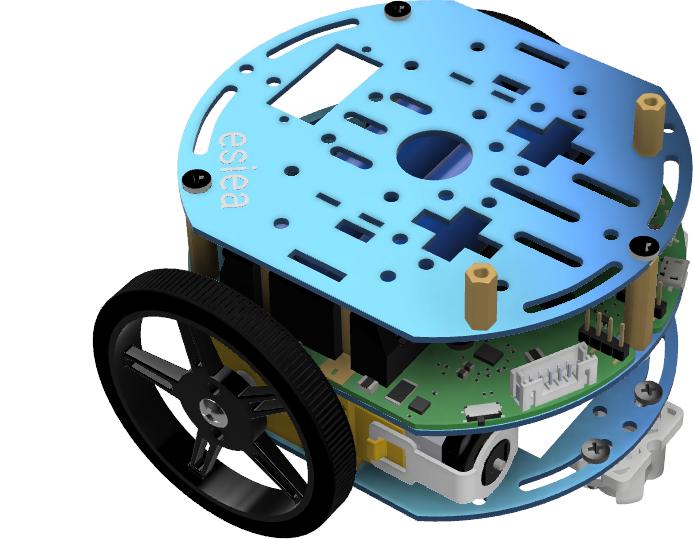
Etape 16
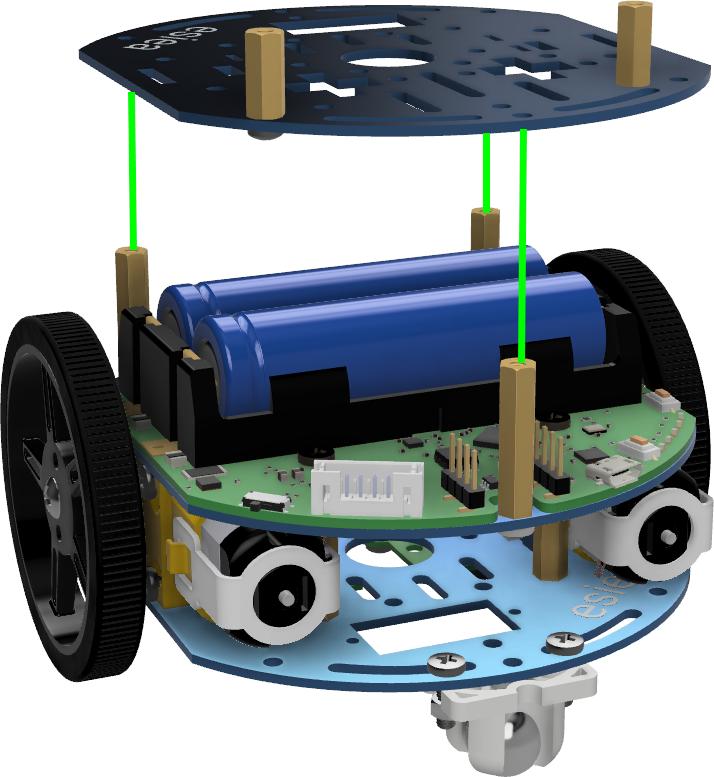
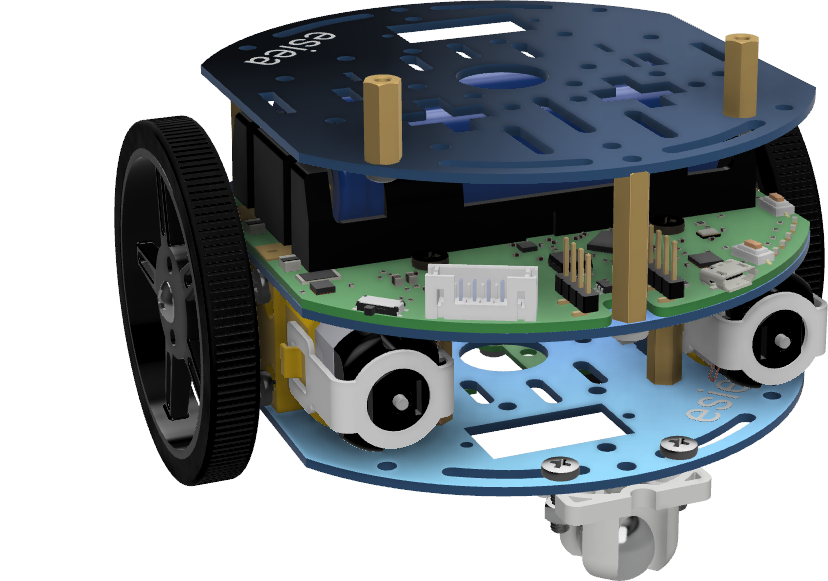
Positionner cette nouvelle plaque de chassis au reste du robot en alignant les entretoises avec les trous du chassis.
Etape 17
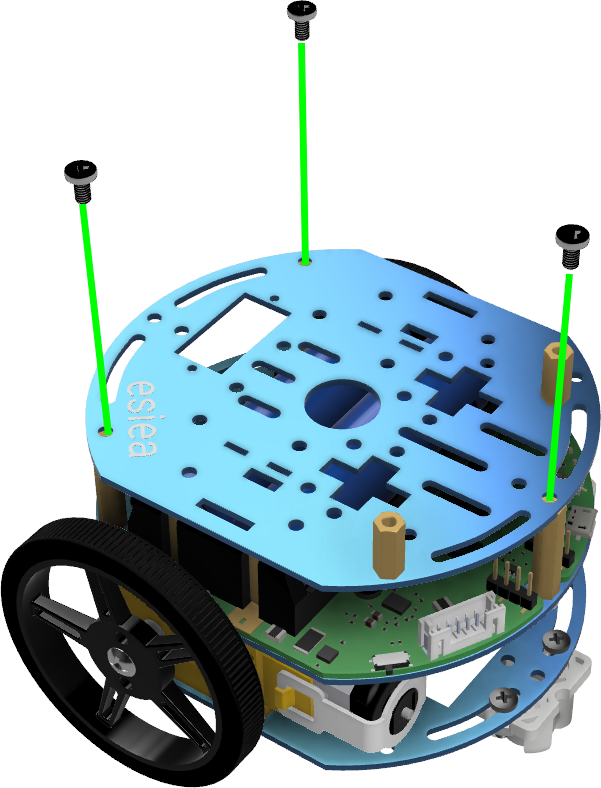
Visser la nouvelle plaque de chassis au reste du robot à l’aide de 3 vis M3 aux emplacements indiqués.
Etape 18
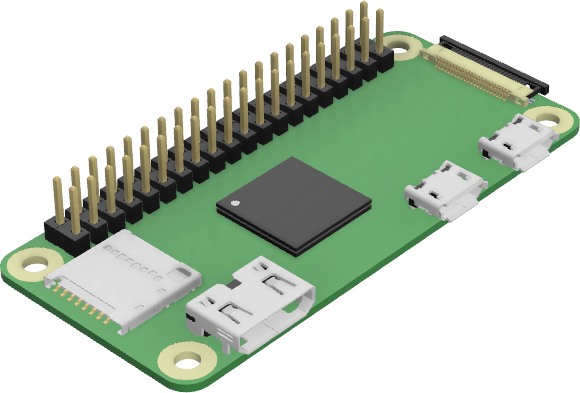
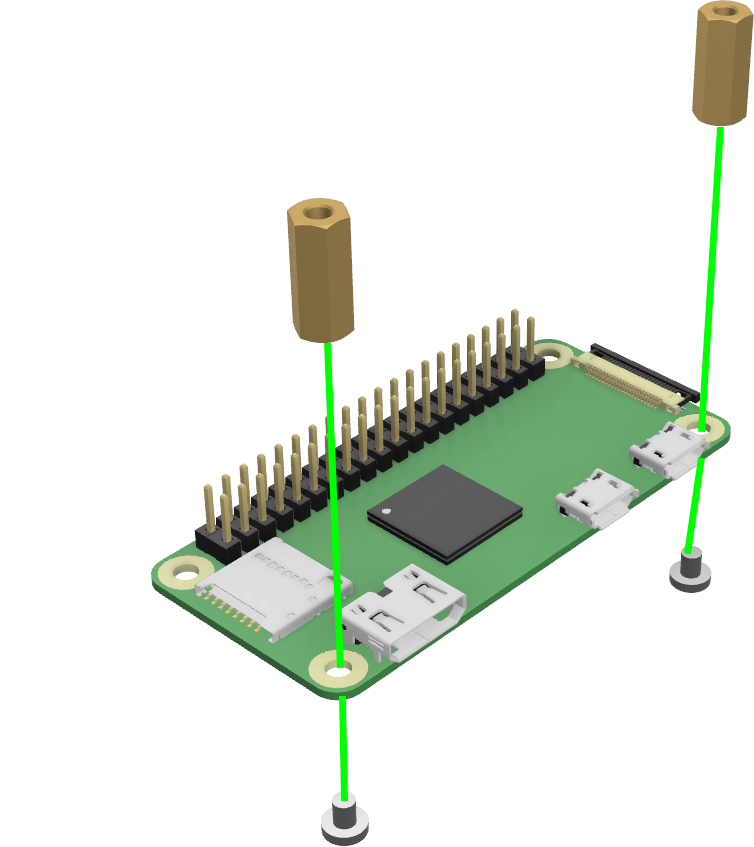
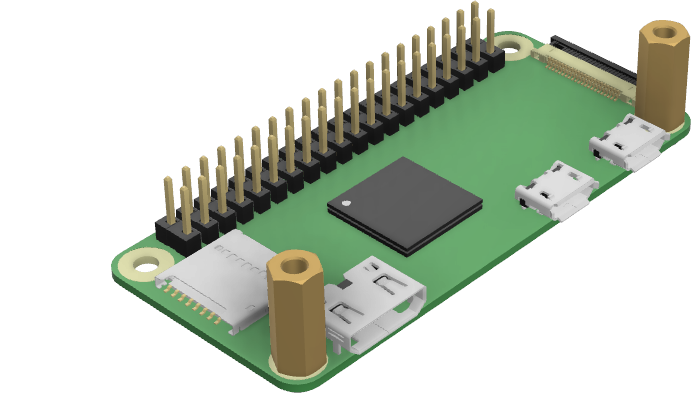
Prendre le Raspberry Pi Zero et visser 2 petites entretoises M2.5 avec leurs vis respectives aux emplacements indiqués.
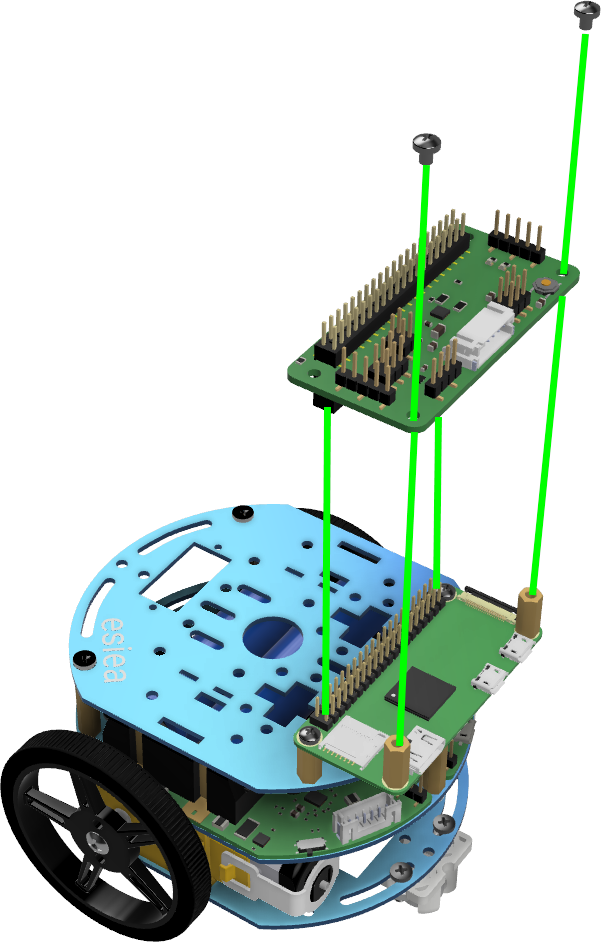
Etape 19
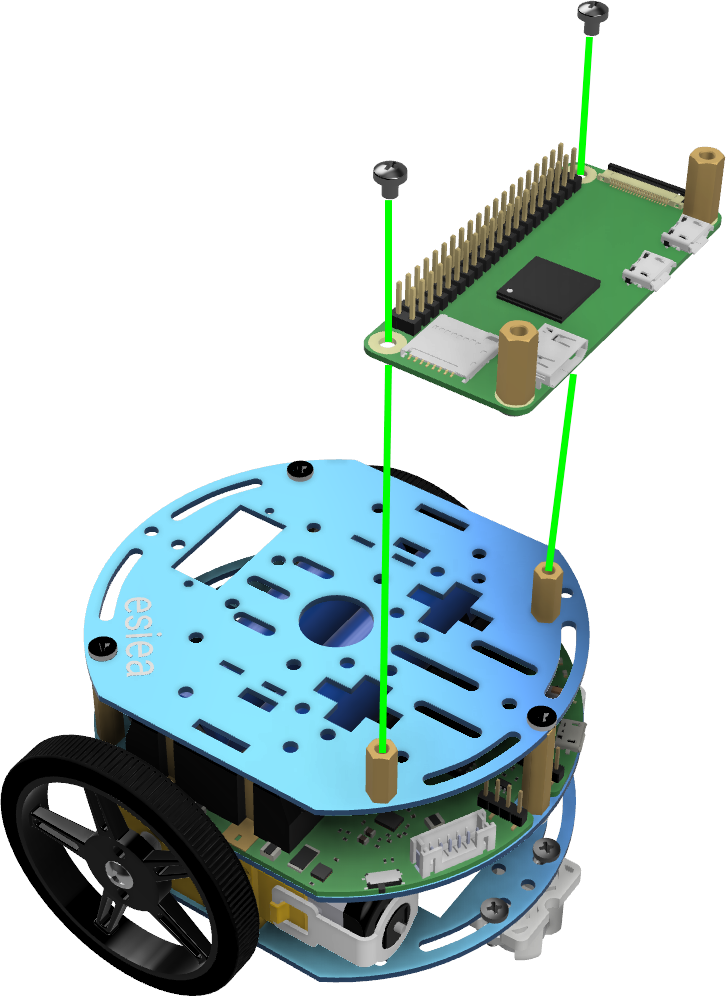
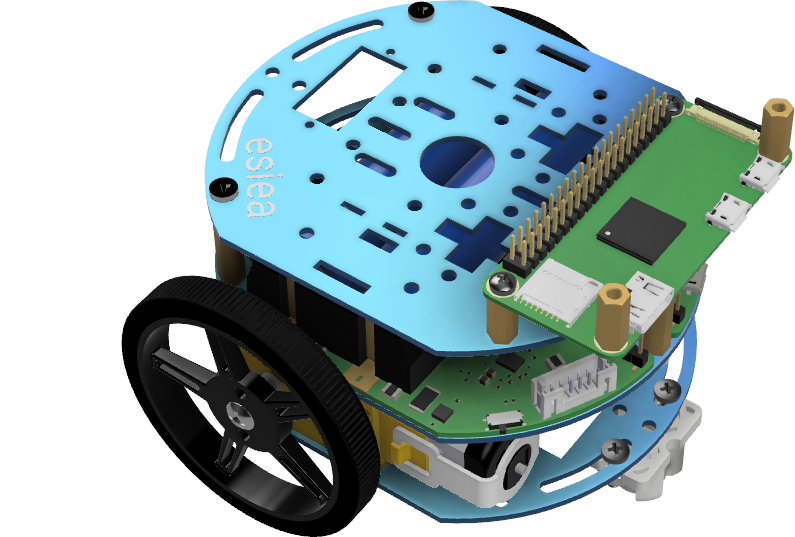
Visser le Raspberry Pi Zero sur la nouvelle plaque de chassis à l’emplacement indiqué à l’aide de 2 vis M2.5.
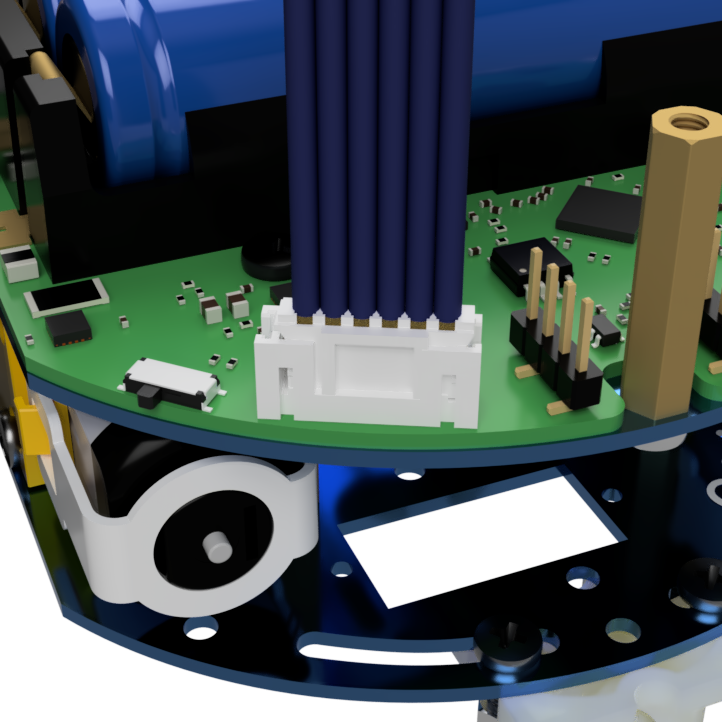
Etape 20
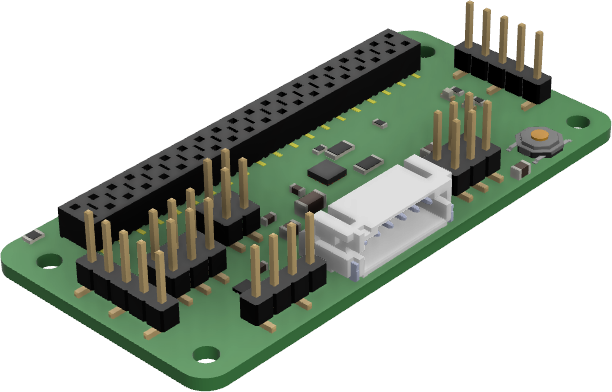
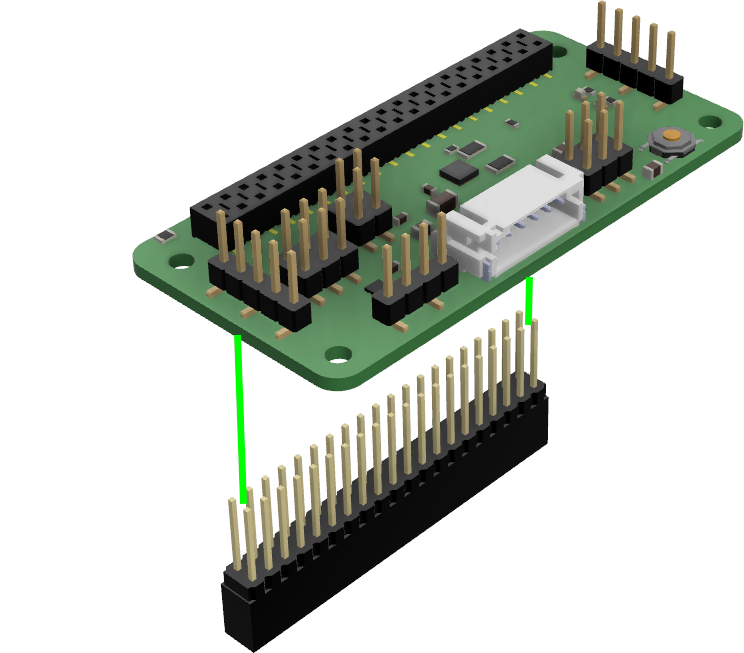
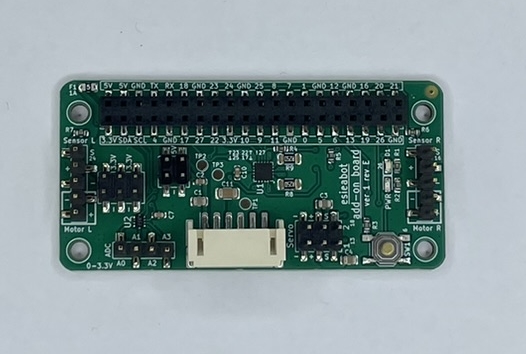
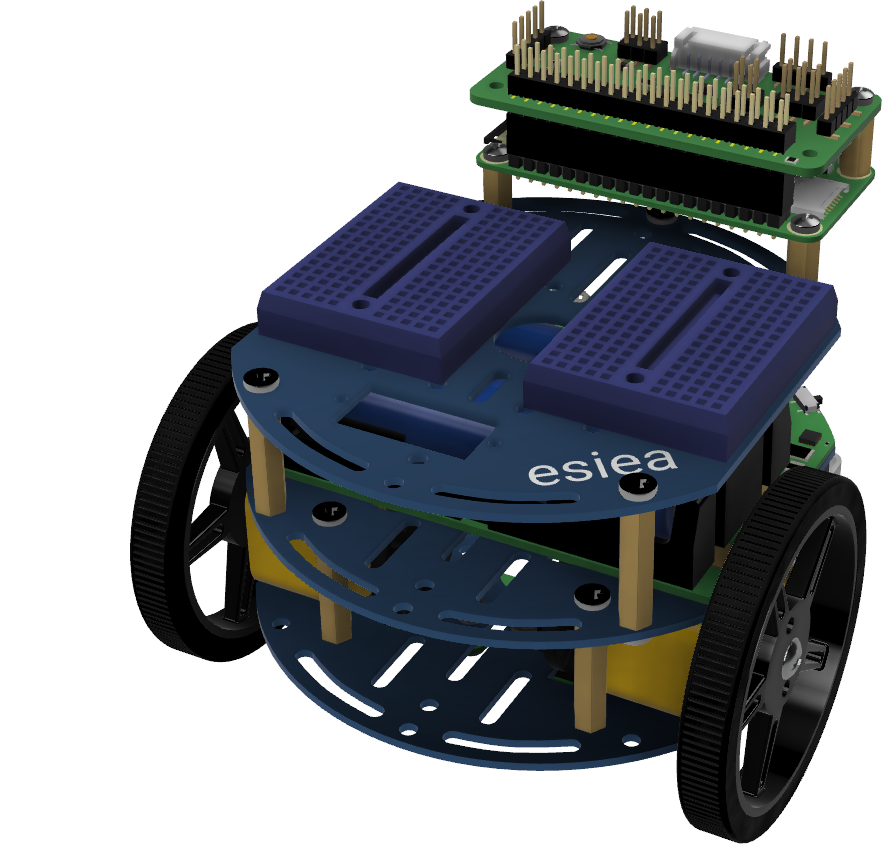
Insérer délicatement le connecteur 40 pins sous l’add-on board à l’emplacement indiqué.
Note
Vous devriez insérer délicatement un côté puis l’autre pour faciliter l’assemblage. Vérifiez que chaque petit pin est bien aligné avec le trou dans lequel il doit rentrer.
Avertissement
Attention, le connecteur peut se tordre facilement. Il est important de le manipuler avec précaution. Si un pin est tordu, il est possible de le redresser délicatement au moment où vous l’insérez.
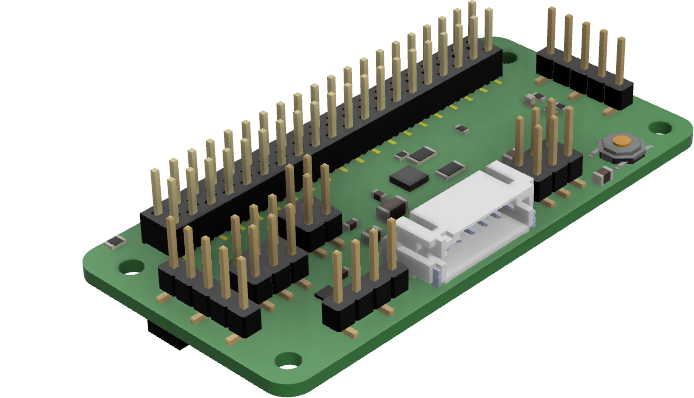
Etape 21
Visser l’add-on board sur le Raspberry Pi Zero à l’aide de 2 vis M2.5 aux emplacements indiqués.
Etape 22
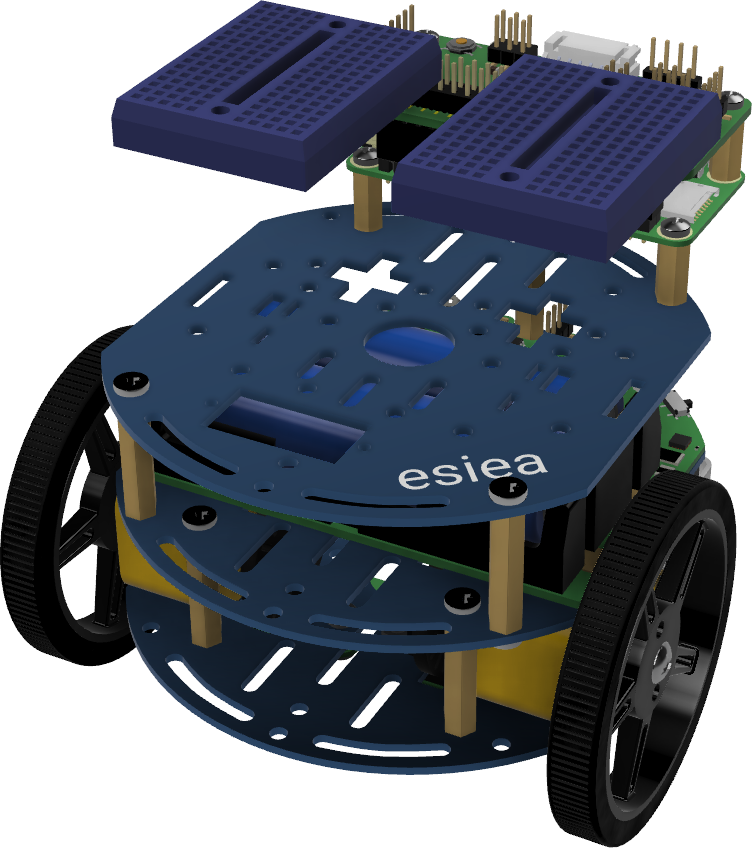
Coller deux breadboards l’une à côté de l’autre sur la plaque de chassis à l’emplacement indiqué.
Note
L’emplacement exact des breadboards n’a pas d’importance. Veillez simplement à ne pas couvrir le trou en forme de rectangle à l’avant de la plaque.
Etape 23
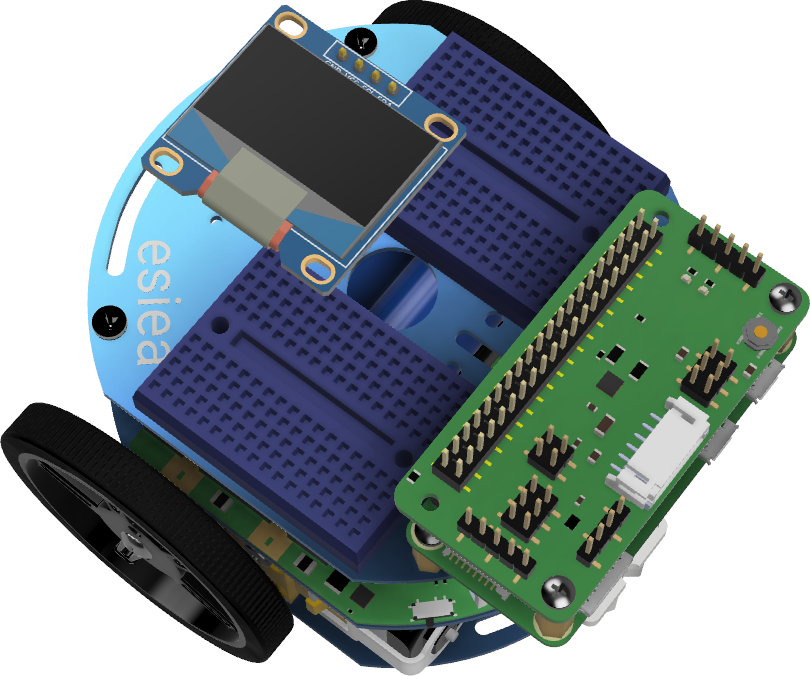

Brancher l’écran OLED sur la breadboard à l’emplacement indiqué.
Note
L’emplacement exact de l’écran OLED sur la breadboard n’a pas d’importance, mais le sens de branchement oui.
Etape 24
Note
Sur la breadboard, les colonnes sont reliées les unes avec les autres sauf au milieu où elles sont coupées. L’emplacement des fils n’a donc pas d’importance, tant qu’il est sur la bonne colonne. De même, la couleur des fils n’a pas d’importance. Il est conseillé cependant de la respecter afin de pouvoir diagnostiquer plus rapidement de potentiel problème avec le support.
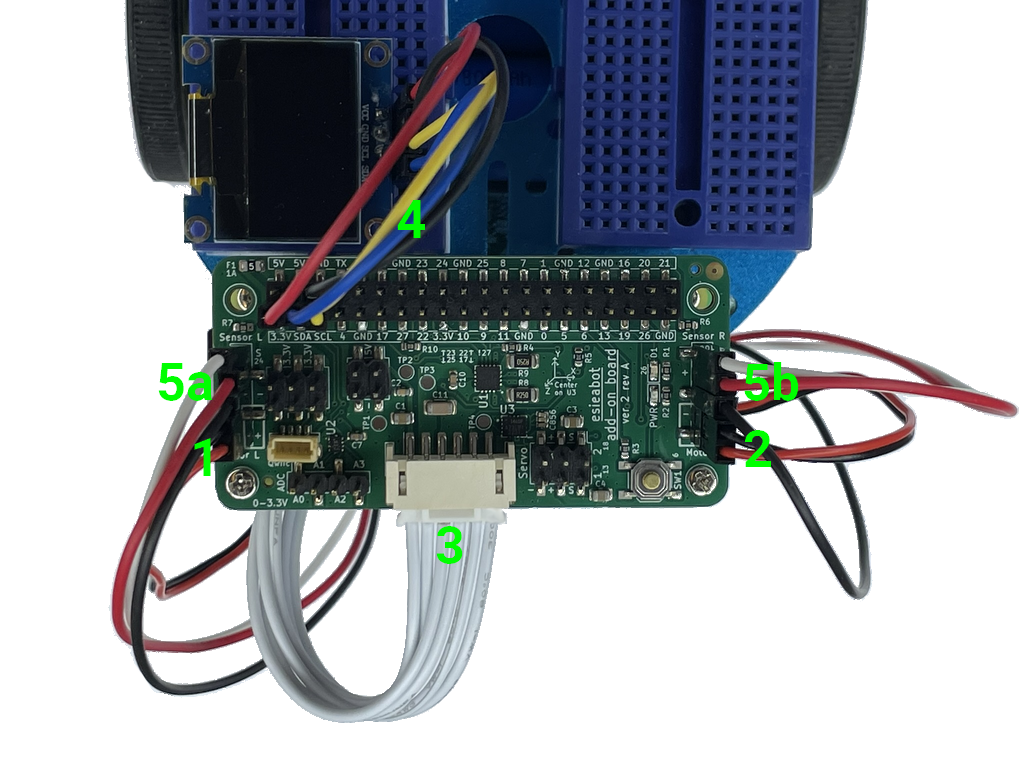
Effectuer les branchements suivants :
Brancher le moteur gauche sur l’add-on board à l’emplacement marqué « Motor L ». Le fil rouge doit être du côté +.
Brancher le moteur droit sur l’add-on board à l’emplacement marqué « Motor R » Le fil rouge doit être du côté +.
Brancher la power board sur l’add-on board via le connecteur JST blanc ou bleu.
Brancher l’écran OLED comme indiqué :
SDA de l’écran sur SDA de l’add-on board via un fil bleu
SCL de l’écran sur SCL de l’add-on board via un fil jaune
VCC de l’écran sur 3.3V de l’add-on board via un fil rouge
GND de l’écran sur GND de l’add-on board via un fil noir
Brancher chaque capteur de vitesse à son emplacement à côté des moteurs sur l’add-on board comme indiqué :
5V du capteur de vitesse sur le + de l’add-on board via un long fil rouge
GND du capteur de vitesse sur le - de l’add-on board via un long fil noir
OUT du capteur de vitesse sur le S de l’add-on board via un long fil blanc
Note
Vous pouvez utiliser les serre cables fournis pour maintenir les fils en place.
Etape 25
Félicitations votre esieabot est maintenant assemblé. Il vous reste maintenant à installer son système d’exploitation pour lui donner vie. Pour se faire, rendez vous dans la rubrique Installation de son esieabot. Si vous avez une tourelle caméra, vous pouvez également l’assembler.