Assemblage esieabot 2023
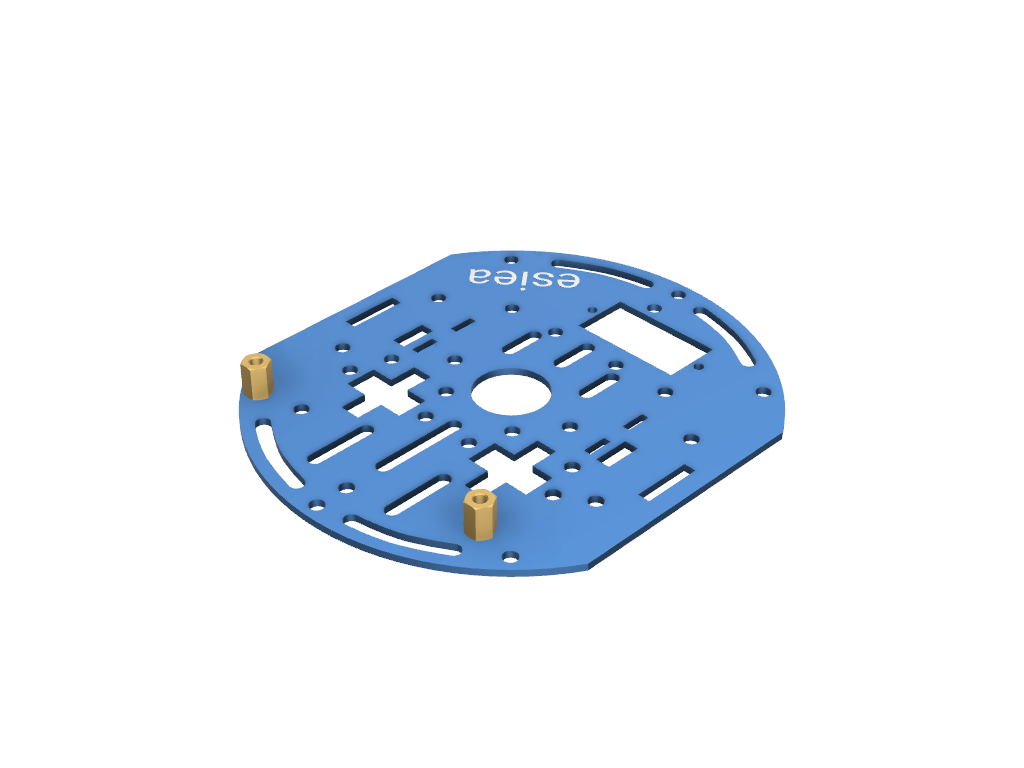
Etape 1
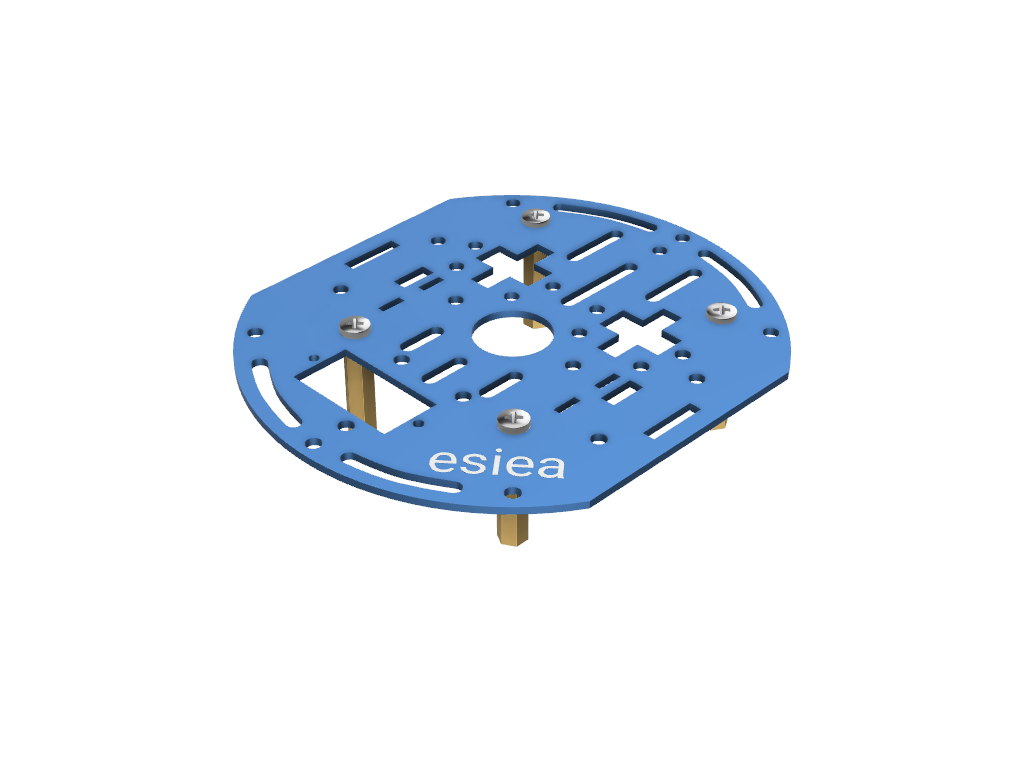
Prendre une plaque et visser en dessous 4 grandes entretoises aux emplacements indiqués. Cette plaque sera ensuite la plaque centrale de l’esieabot.
Avertissement
Attention à l’orientation de la plaque. Le logo peut vous aider à vous orienter.
Etape 2
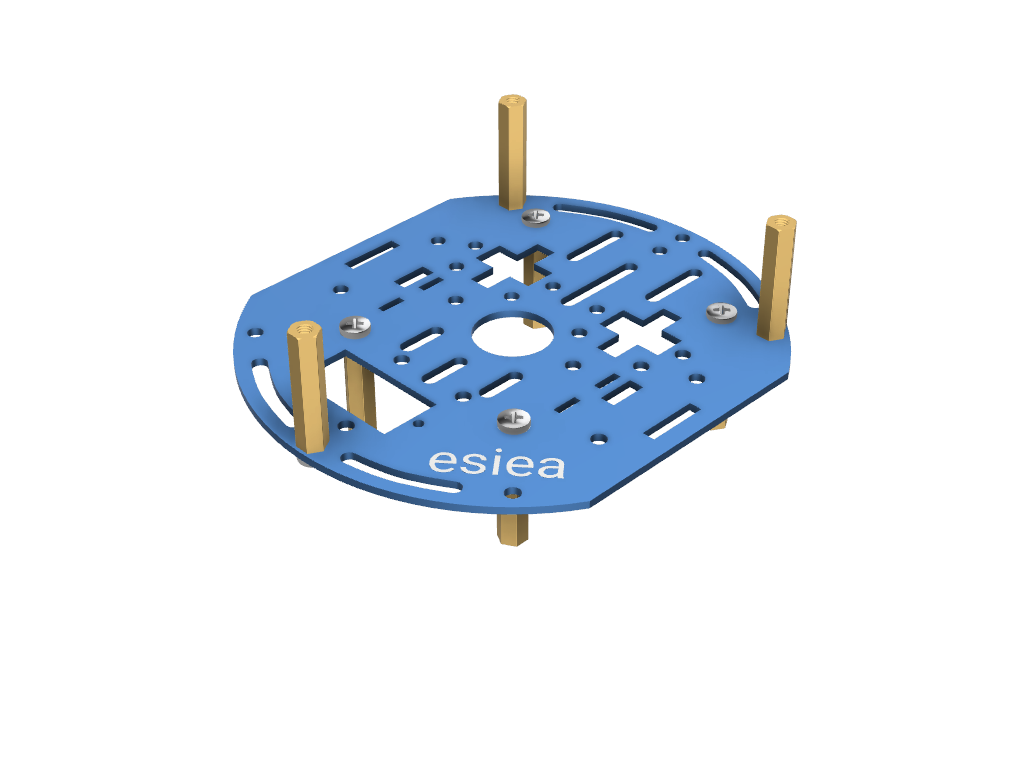
Sur la même plaque, visser 3 grandes entretoises sur le dessus aux emplacements indiqués.
Etape 3

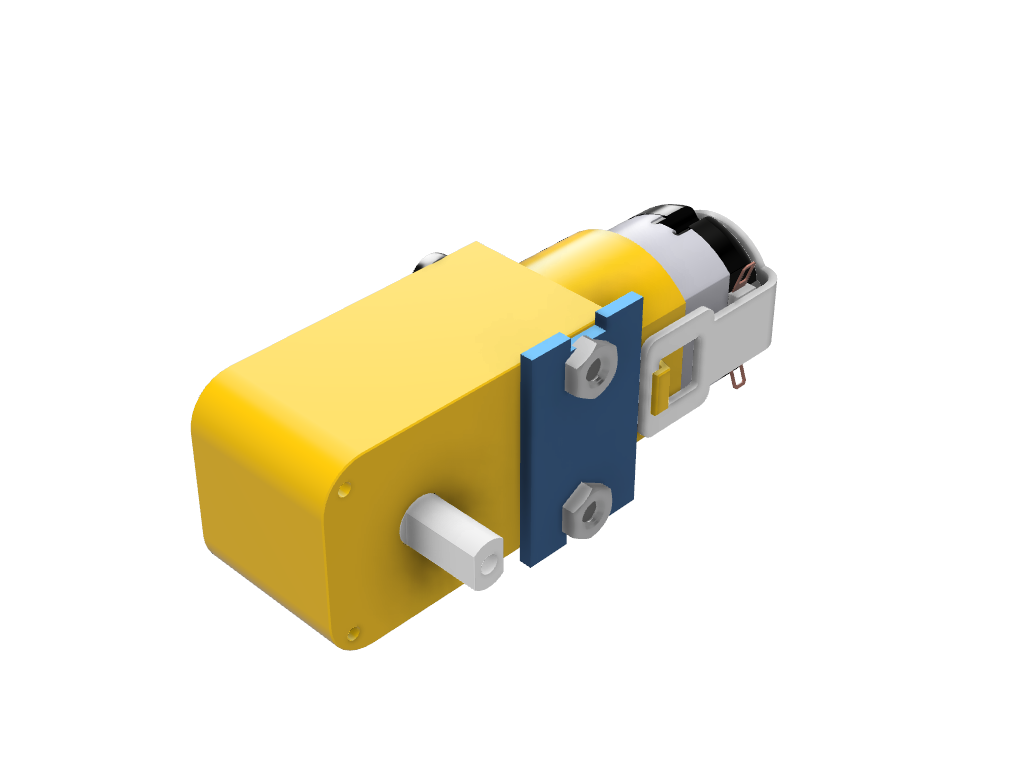
Prendre les deux moteurs et visser avec les grandes vis les supports de moteur en métal.
Avertissement
Attention, le placement des supports a un sens à respecter. Il y a un petit détrompeur sous la forme d’un cylindre jaune sur les moteurs. Le support en métal doit être installé de l’autre côté.
Etape 4
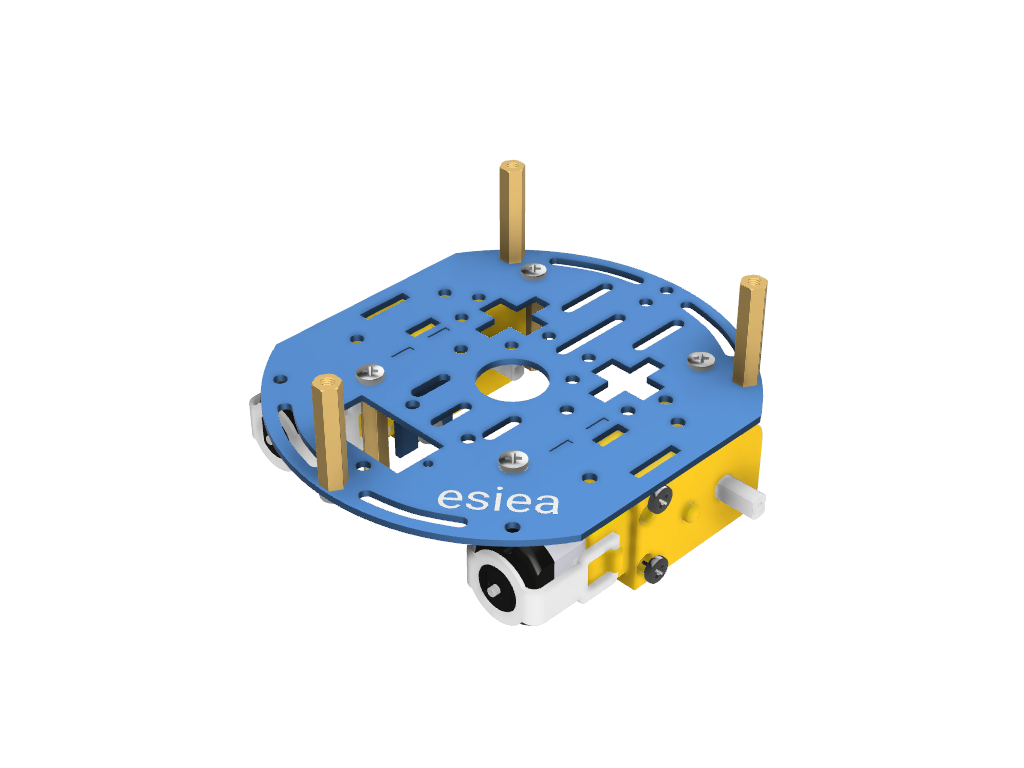
Positionner les moteurs sur la plaque centrâle aux emplacements indiqués. Ils seront fixés définitivement par la suite.
Etape 5
Prendre une nouvelle plaque et la visser sur l’ancienne à l’emplacement indiqué. Les moteurs doivent alors être fixés.
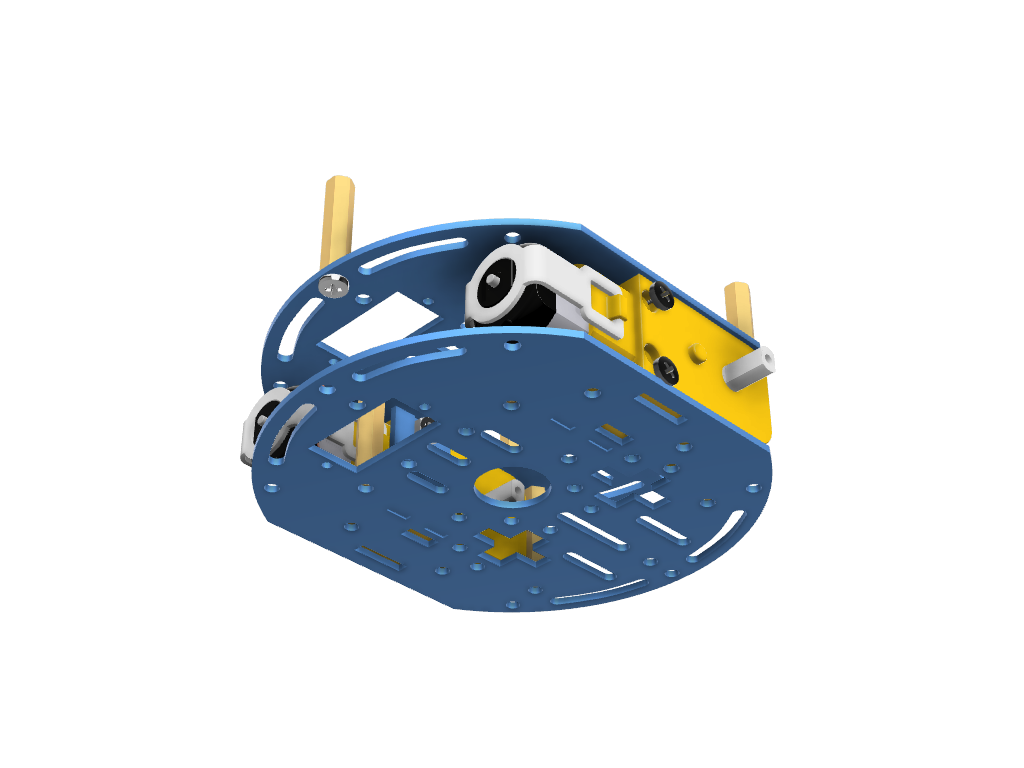
Etape 6
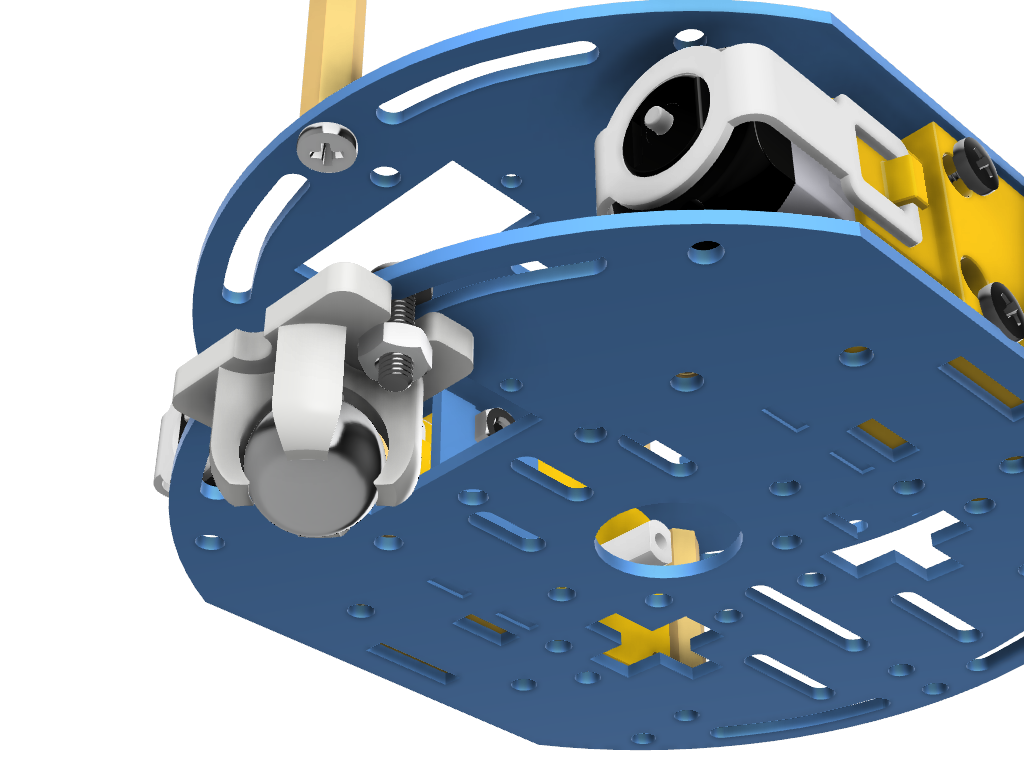
Visser la roue libre à la nouvelle plaquer sur l’emplacement indiqué. Il est plus simple de d’abord positionner les vis sans les serrer complètement pour ensuite y insérer la roue.
Etape 7
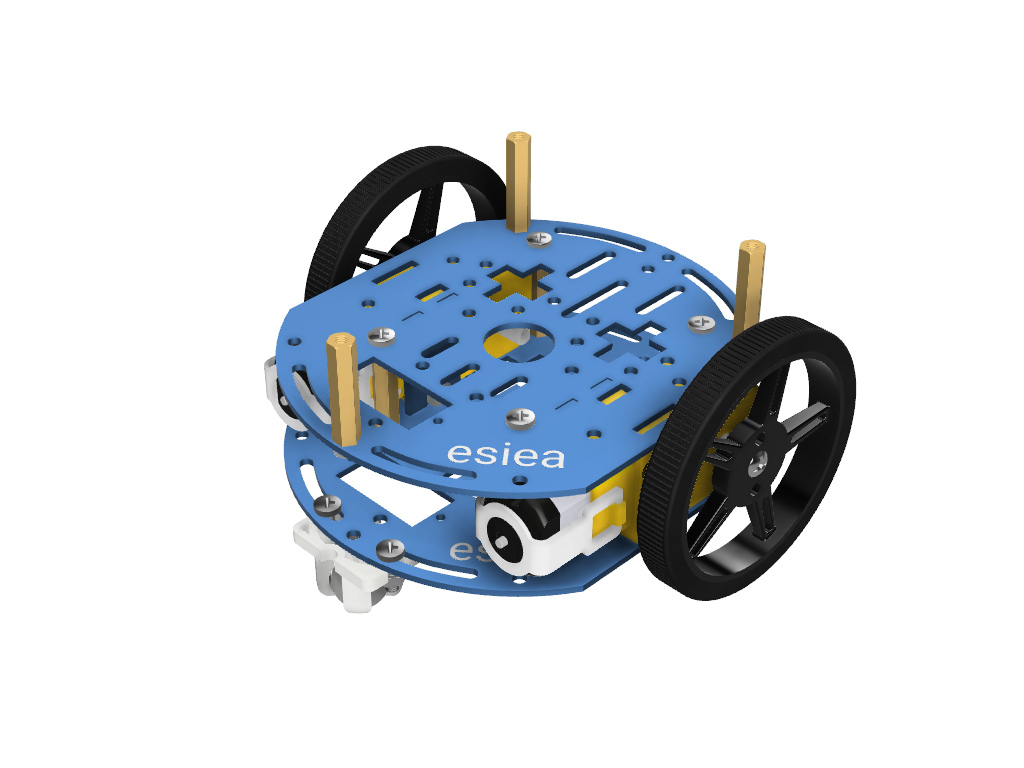
Visser les roues et leurs pneus aux moteurs.
Etape 8

Positionner le support de piles au milieu de l’esieabot grâce à des scratchs.
Avertissement
Vous ne pouvez pas charger vos piles lorsqu’elles sont dans le porte-piles. Il faut absolument les sortir.
Etape 9
Prendre une nouvelle plaque et visser de petites entretoises aux emplacements indiqués.
Etape 10
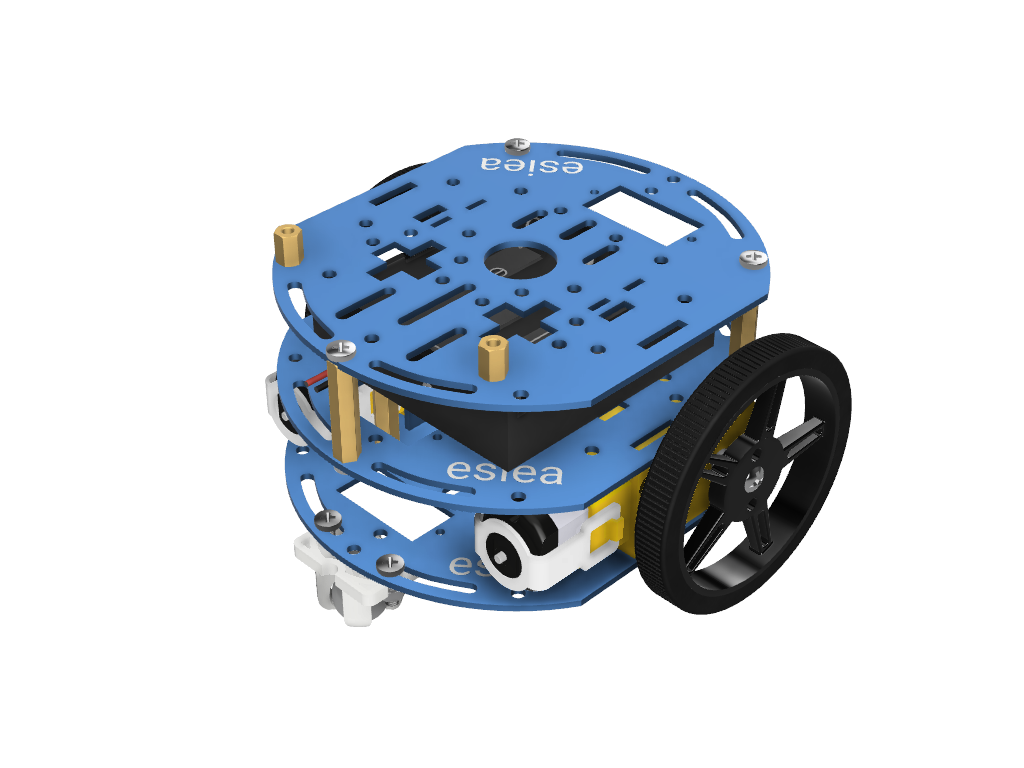
Visser cette nouvelle plaque au dessus de l’esieabot.
Etape 11
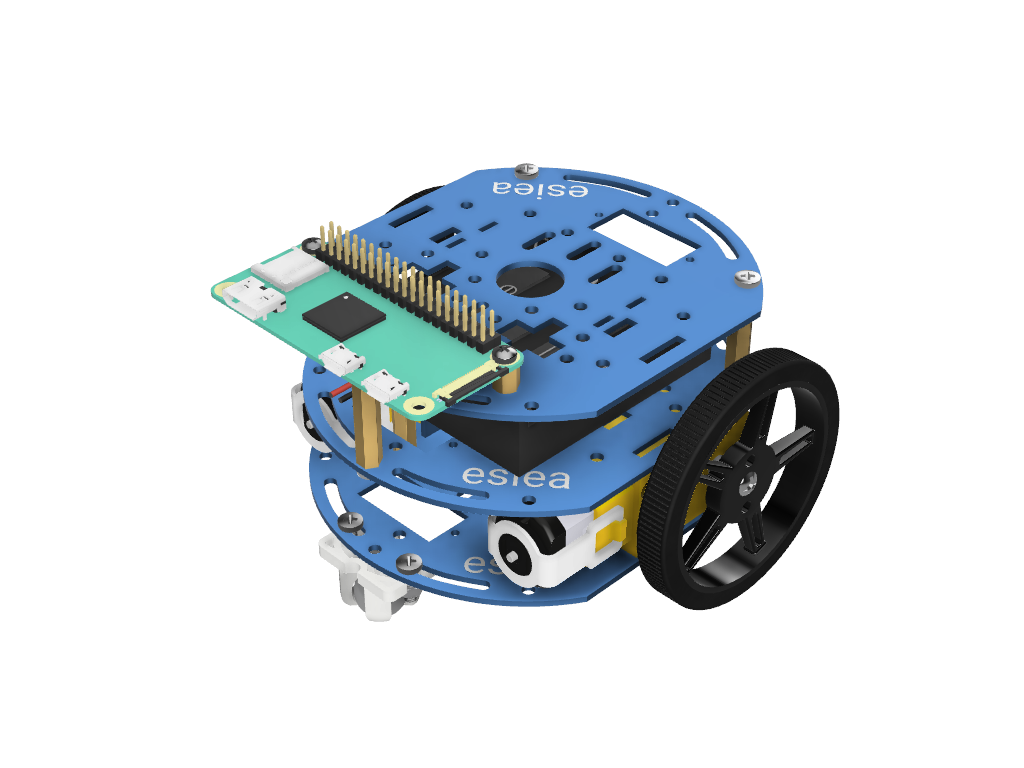
Visser le Raspberry Pi sur les petites entretoises vissées à l’étape 9.
Etape 12
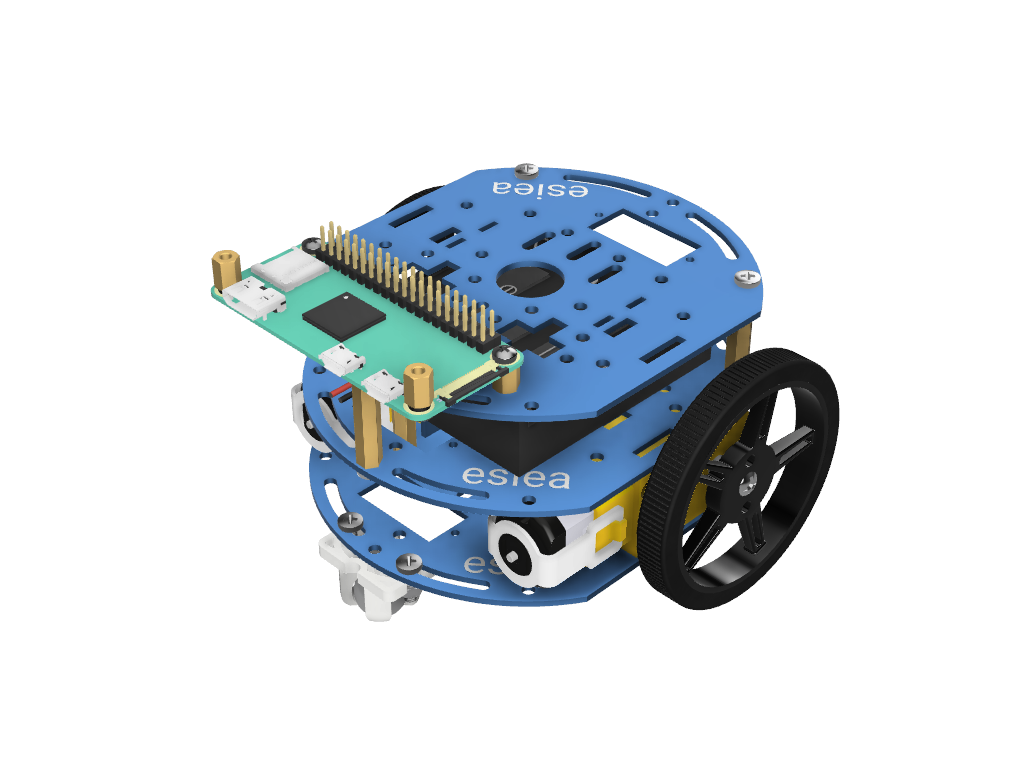
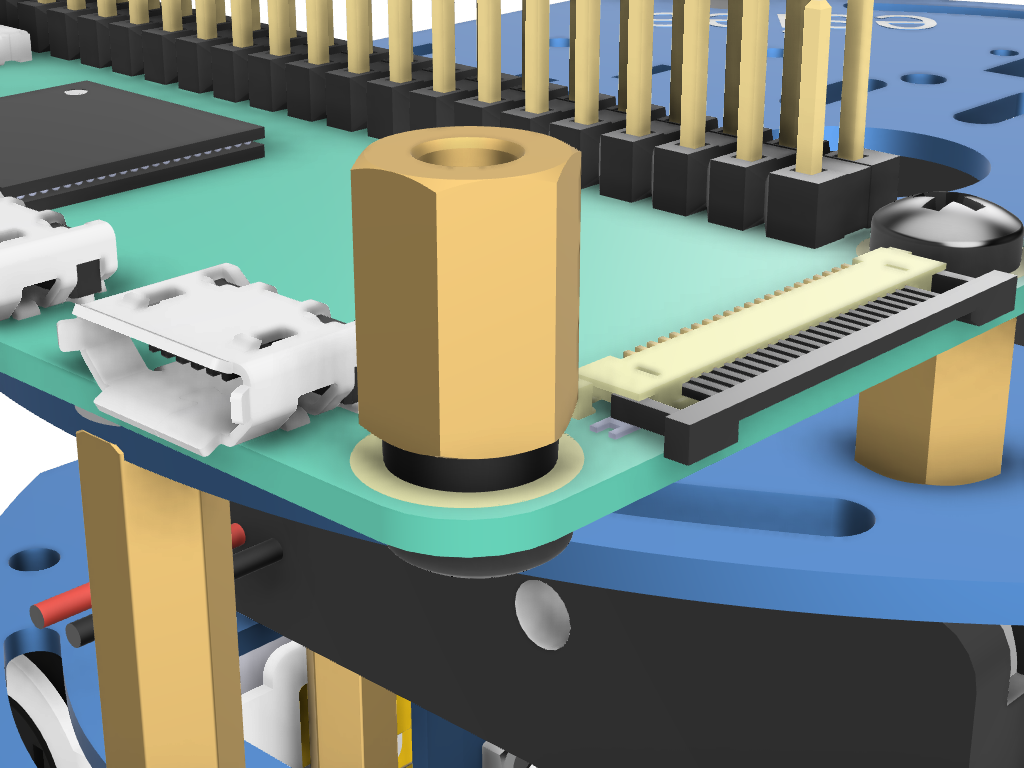
Visser sur le Raspberry Pi de petites entretoises aux emplacements indiqués en veillant à positionner une rondelle en plastique comme indiqué.
Etape 13
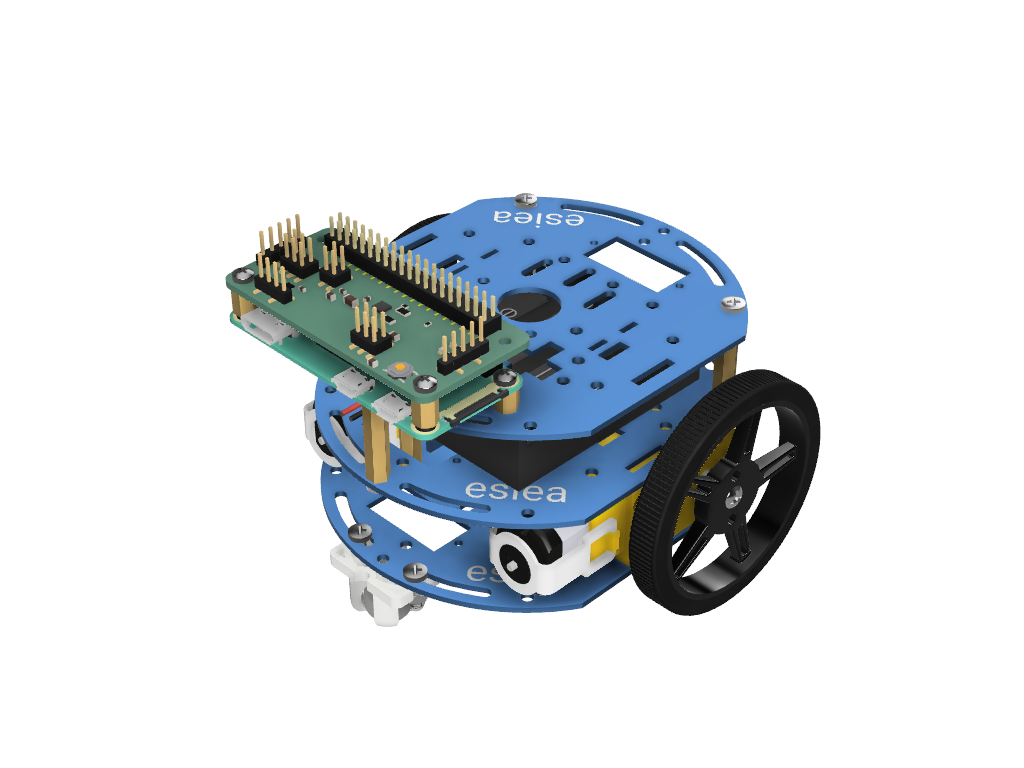
Positionner l’add-on board au dessus du Raspberry Pi et le visser.
Etape 14
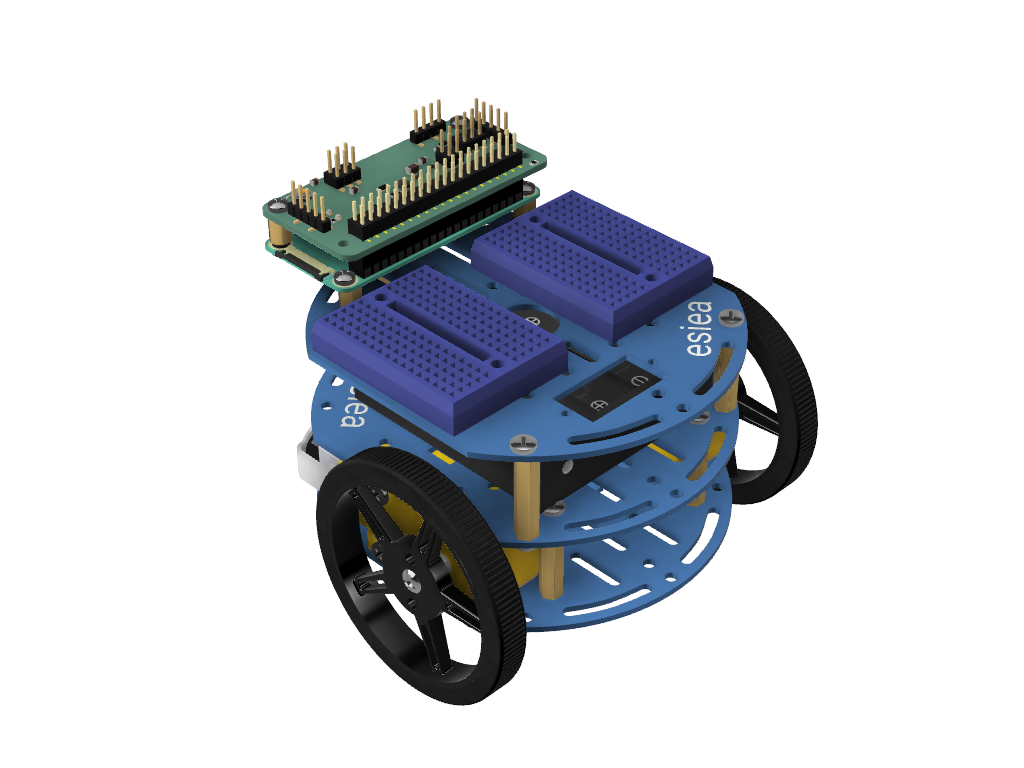
Positionner les 2 breadboards autocollantes comme indiqué.
Etape 15
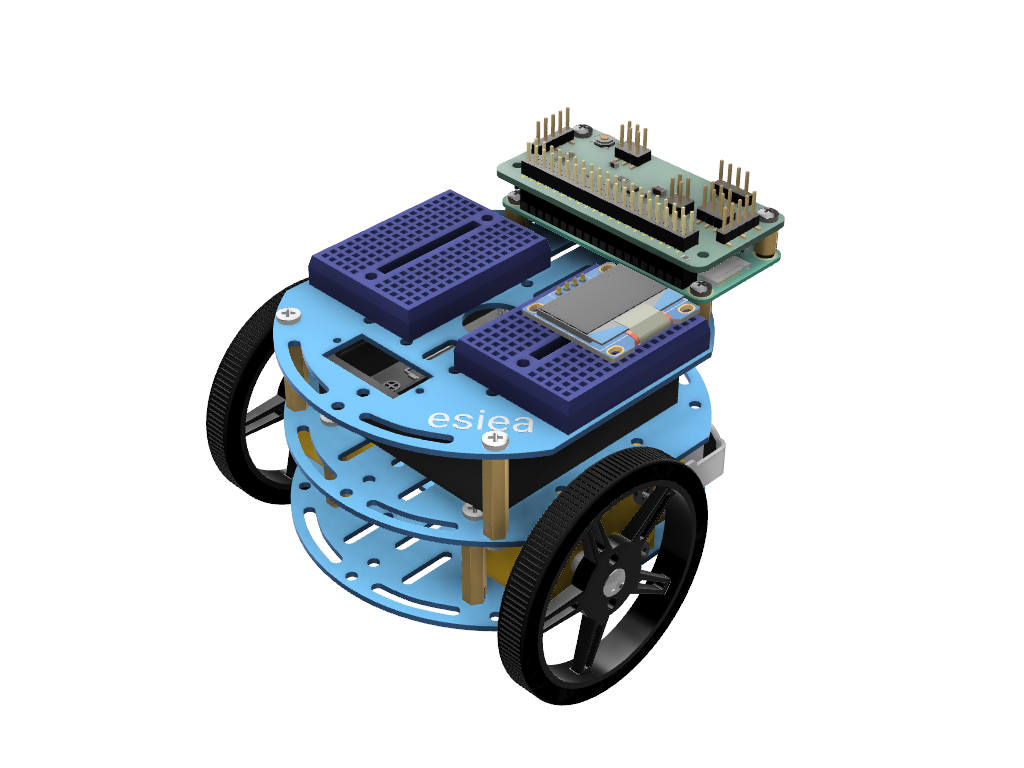
Brancher l’écran OLED sur l’une des breadboard comme indiqué.
Avertissement
Attention, vous devez respecter l’orientation de l’écran indiquée
Etape 16
Avertissement
Ne branchez pas les piles tant que vous n’avez pas vérifié que le reste du branchement était correct. Vous risqueriez de détruire des composants sinon.
Note
Sur la breadboard, les colonnes sont reliées les unes avec les autres sauf au milieu où elles sont coupées. L’emplacement des fils n’a donc pas d’importance, tant qu’il est sur la bonne colonne. De même, la couleur des fils n’a pas d’importance. Il est conseillé cependant de la respecter afin de pouvoir diagnostiquer plus rapidement de potentiel problème avec le support.
Effectuer les branchements suivants :
Brancher le moteur gauche sur l’add-on board à l’emplacement marqué « Motor L ». Le fil rouge doit être du côté +.
Brancher le moteur droit sur l’add-on board à l’emplacement marqué « Motor R » Le fil rouge doit être du côté +.
Brancher le porte pile sur l’add-on board via le connecteur JST blanc.
Brancher l’écran OLED comme indiqué :
SDA de l’écran sur SDA de l’add-on board via un fil bleu
SCL de l’écran sur SCL de l’add-on board via un fil jaune
VCC de l’écran sur 3.3V de l’add-on board via un fil rouge
GND de l’écran sur GND de l’add-on board via un fil noir
Etape 17
Félicitations votre esieabot est maintenant assemblé. Il vous reste maintenant à installer son système d’exploitation pour lui donner vie. Pour se faire, rendez vous dans la rubrique Utiliser un esieabot. Si vous avez une tourelle caméra, vous pouvez également l’assembler.