Assemblage esieabot 2020
Note
Ceci est le manuel de l’esieabot 2020, le tout premier esieabot distribué à des étudiants. Cette documentation est basée sur le très imparfait manuel distribué à l’époque aux étudiants. Il n’est pas destiné à être utilisé pour les versions plus récentes de l’esieabot.
Inventaire
Image |
Description |
Quantité |
|---|---|---|

|
Grande entretoise avec vis |
6 |

|
Petite entretoise avec vis |
2 |
|
Grande vis avec écrou |
4 |

|
Carte micro SD de 8Go avec adaptateur USB |
1 |

|
Manette USB filaire |
1 |

|
Roue libre |
1 |
|
Petite vis avec écrou |
2 |

|
Câble micro USB |
1 |

|
Support de piles |
1 |

|
Caméra 5Mpx |
1 |

|
Batterie USB pour piles AA |
1 |

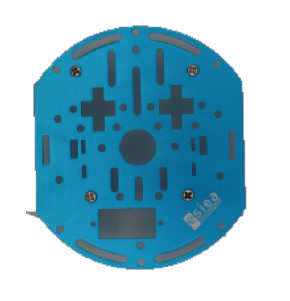
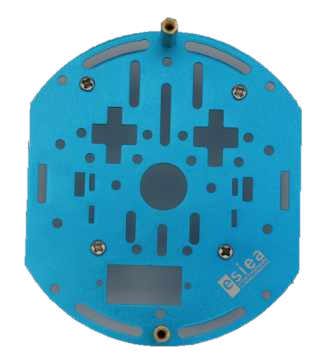
|
Plaque en métal |
3 |
|
Raspberry Pi 0WH |
1 |
|
Roue avec pneu et vis |
2 |

|
Moteur |
2 |

|
Scratchs mâle/femelle |
5 |

|
Mini tournevis |
1 |
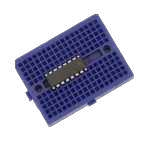
|
Mini breadboard avec pont en H L293D |
1 |

|
Adaptateur USB type A vers micro USB |
1 |

|
Câble micro USB coudé |
1 |

|
Support moteur en métal |
2 |

|
Fils mâle-mâle |
1 lot |

|
Fils mâle-femelle |
1 lot |
|
Bon sens |
1 |
Etape 1

Prendre une plaque et visser en dessous 4 grandes entretoises aux emplacements indiqués. Cette plaque sera ensuite la plaque centrale de l’esieabot.
Avertissement
Attention à l’orientation de la plaque. Le logo peut vous aider à vous orienter.
Etape 2

Sur la même plaque, visser 2 grandes entretoises sur le dessus aux emplacements indiqués.
Etape 3


Prendre 2 scratchs mâle/femelle et les placer sous le support des piles.
Etape 4


Coller le support des piles sur la plaque centrâle à l’emplacement indiqué.
Note
Vous pouvez mettre vos piles dans le support de piles dès à présent pour faciliter le montage.
Etape 5

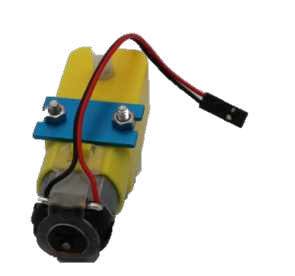

Prendre les deux moteurs et visser avec les grandes vis les supports de moteur en métal.
Avertissement
Attention, le placement des supports a un sens à respecter. Il y a un petit détrompeur sous la forme d’un cylindre jaune sur les moteurs. Le support en métal doit être installé de l’autre côté.
Etape 6
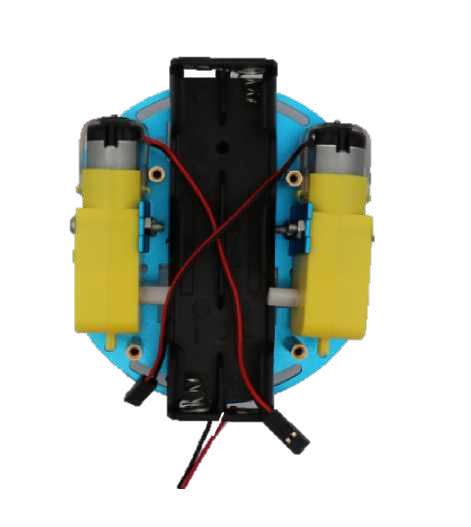
Positionner les moteurs sur la plaque centrâle aux emplacements indiqués. Ils seront fixés définitivement par la suite.
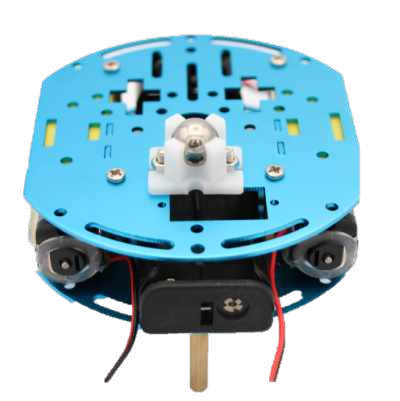
Etape 7

Prendre une nouvelle plaque et visser à l’emplacement indiqué la roue libre avec les petites vis.
Etape 8
Positionner et visser cette nouvelle plaque sur l’ancienne à l’emplacement indiqué. Les moteurs doivent alors être fixés.
Etape 9

Prendre 2 scratchs mâle/femelle et les placer sous la batterie USB.
Etape 10

Coller la batterie USB sur la plaque à l’emplacement indiqué.
Etape 11


Visser les roues avec leur pneu sur les emplacements indiqués.
Etape 12


Visser les petites entretoises sur le Raspberry Pi aux emplacements indiqués.
Note
Si les trous sont trop petits, vous pouvez prendre des ciseaux pour très légèrement le limer et ainsi l’agrandir.
Etape 13


Prendre une nouvelle plaque et visser le Raspberry Pi à l’emplacement indiqué.
Etape 14
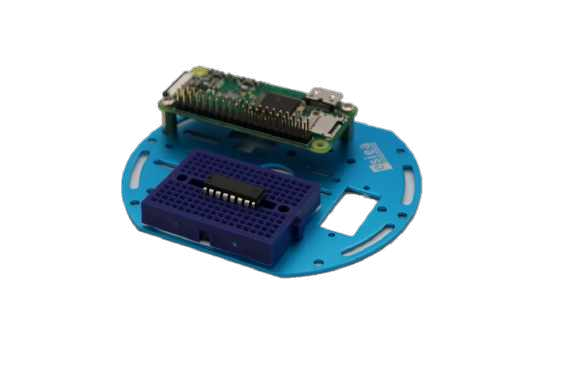
Sur cette nouvelle plaque, coller la breadboard avec le pont en H à l’emplacement indiqué.
Etape 15
Visser cette plaque au reste du robot à l’emplacement indiqué.
Etape 16

Prendre la caméra et coller à son dos un scratch mâle/femelle. Coller ensuite le tout à l’avant de l’esieabot.
Etape 17




Attacher la nappe de la caméra au Raspberry Pi comme indiqué.
Etape 18
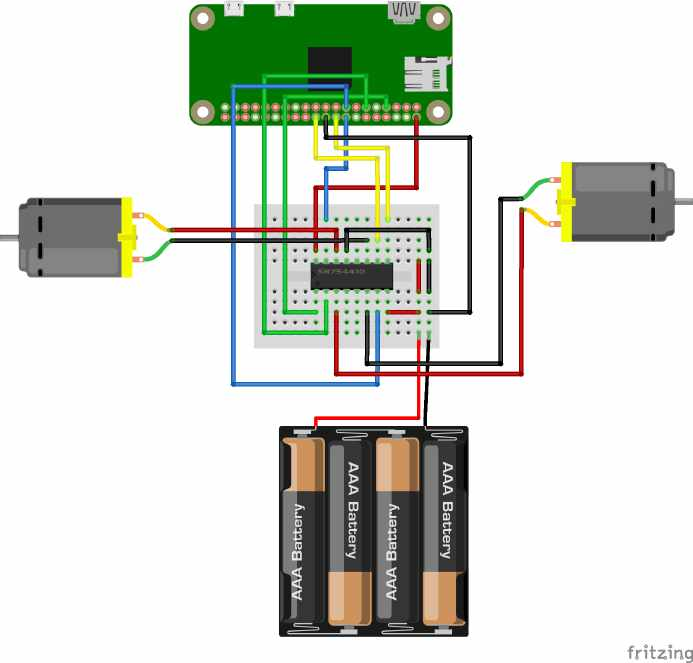
Brancher les fils entre les moteurs, le Raspberry Pi et la breadboard comme indiqué.
Avertissement
Ne branchez pas les piles tant que vous n’avez pas vérifiez que le reste du branchement était correct. Vous risqueriez de détruire des composants sinon.
Note
Sur la breadboard, les colonnes sont reliées les unes avec les autres sauf au milieu où elles sont coupées. L’empalcement des fils n’a donc pas d’importance, tant qu’il est sur la bonne colonne. De même, la couleur des fils n’a pas d’importance. Il est conseillé cependant de la respecter afin de pouvoir diagnostiquer plus rapidement de potentiel problème avec le support.
Etape 19
Brancher le câble micro-USB coudé entre la batterie USB et le port PWR du Raspberry Pi. Brancher l’adaptateur USB type A vers micro USB entre la manette et le port USB du Raspberry Pi.
Etape 20

Félicitations votre esieabot est maintenant assemblé. Il vous reste maintenant à installer son système d’exploitation pour lui donner vie. Pour se faire, rendez vous dans la rubrique Utiliser un esieabot.