Assemblage tourelle 2021 et 2022
Note
Ceci est le manuel de la tourelle caméra de l’esieabot 2021 et 2022. Cette documentation est basée sur le manuel distribué à l’époque aux étudiants. Il n’est pas destiné à être utilisé pour les autres versions de l’esieabot.
Inventaire
Image |
Description |
Quantité |
|---|---|---|

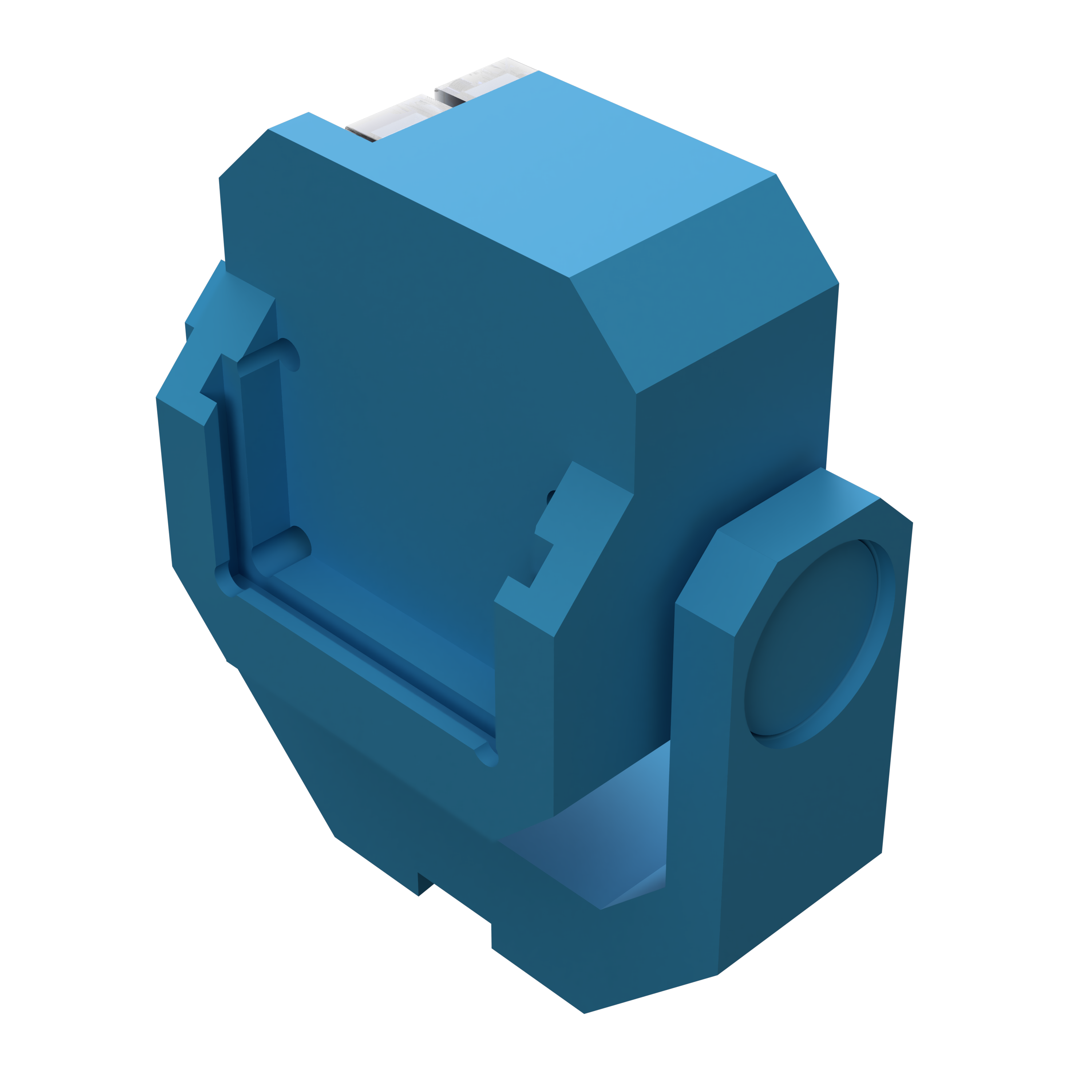
|
Kit de tourelle imprimé en 3D. Voir Fabriquer une tourelle 2021 et 2022. |
1 |

|
Servo moteur 9g |
2 |

|
Caméra type Raspberry Pi Camera 1.2 |
1 |

|
Fil mâle/femelle |
2 |

|
Fil mâle/mâle |
4 |
Etape 1
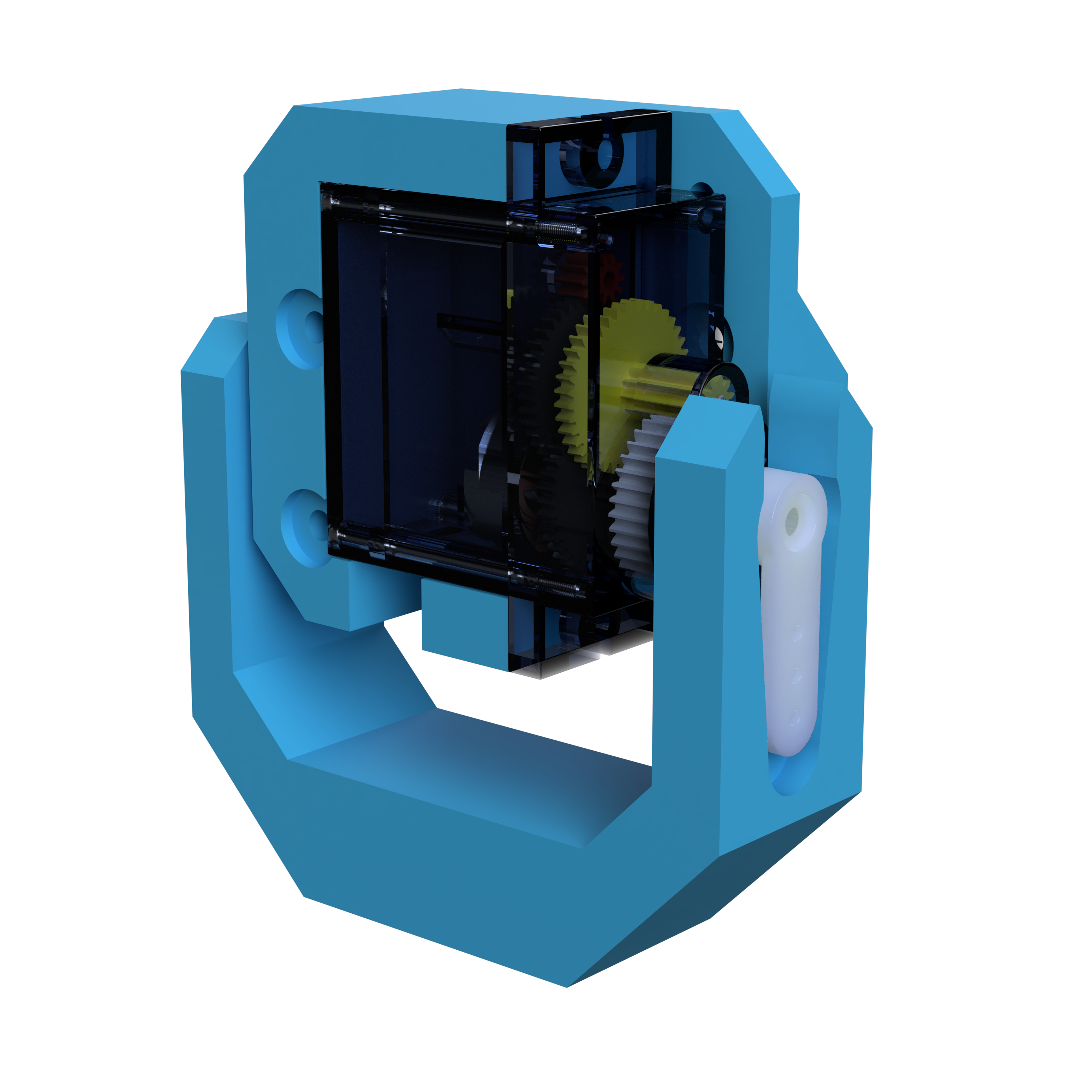
Positionner et visser un des servo moteur dans l’emplacement prévu à cet effet.
Etape 2
Positionner et visser la pièce en U de la tourelle sur le servo moteur.
Etape 3
Prendre le second servo moteur et le positionner comme ceci sur la pièce en plastique correspondante. Mettre sur le servo la pièce blanche fourni avec comme indiqué.
Etape 4
Assembler les 2 servo moteurs et leurs supports en plastique comme ceci.
Etape 5
Prendre la dernière pièce en plastique et la positionner pour sécuriser le tout.
Etape 6
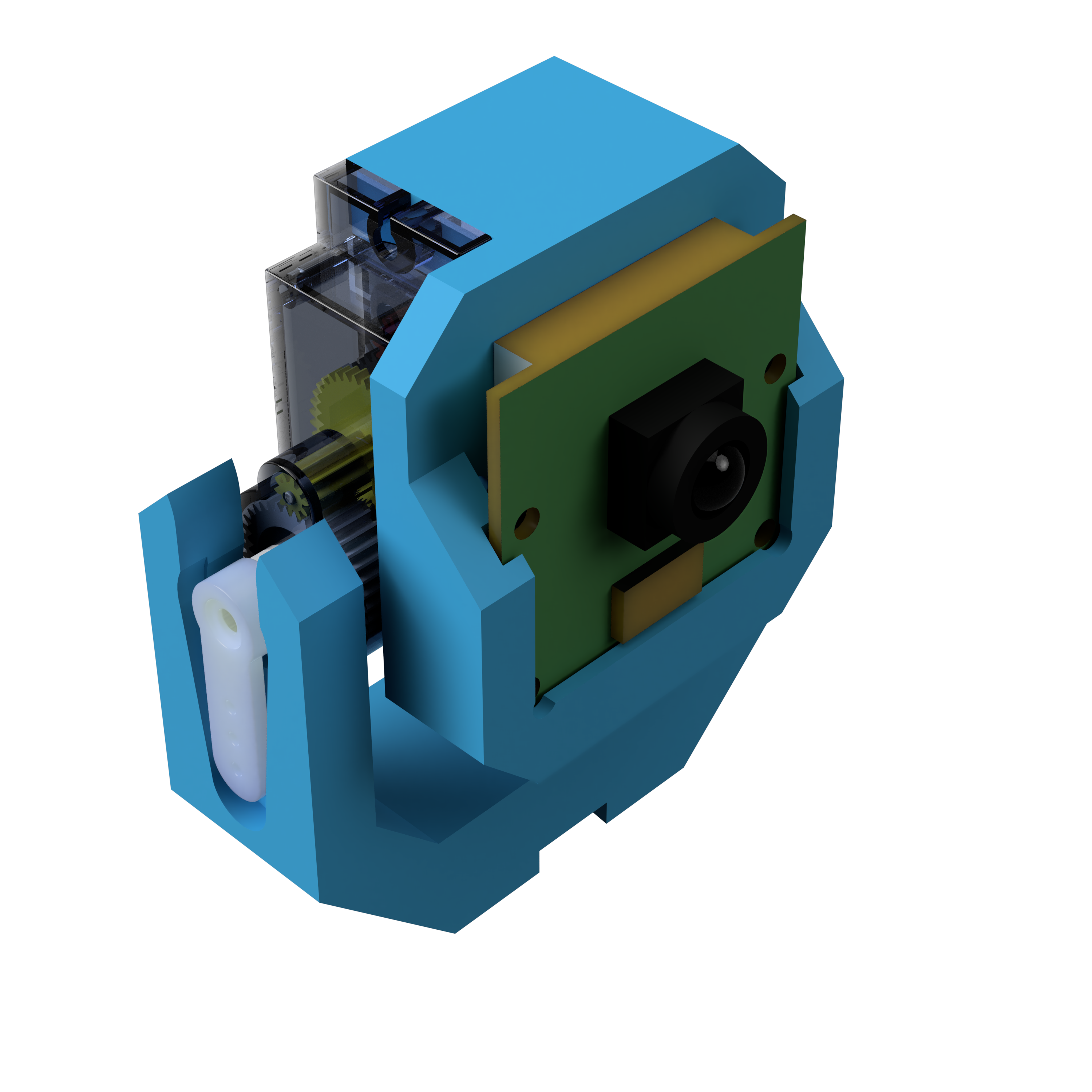
Installer la caméra dans l’emplacement prévu à cet effet.
Avertissement
La nappe de la caméra est plutôt fragile. Manipulez la avec précaution.
Etape 7
Note
Si vous avez un esieabot 2023 ou plus récent, vous devez brancher les servomoteurs sur l’add-on board directement et ne pas suivre cette étape.
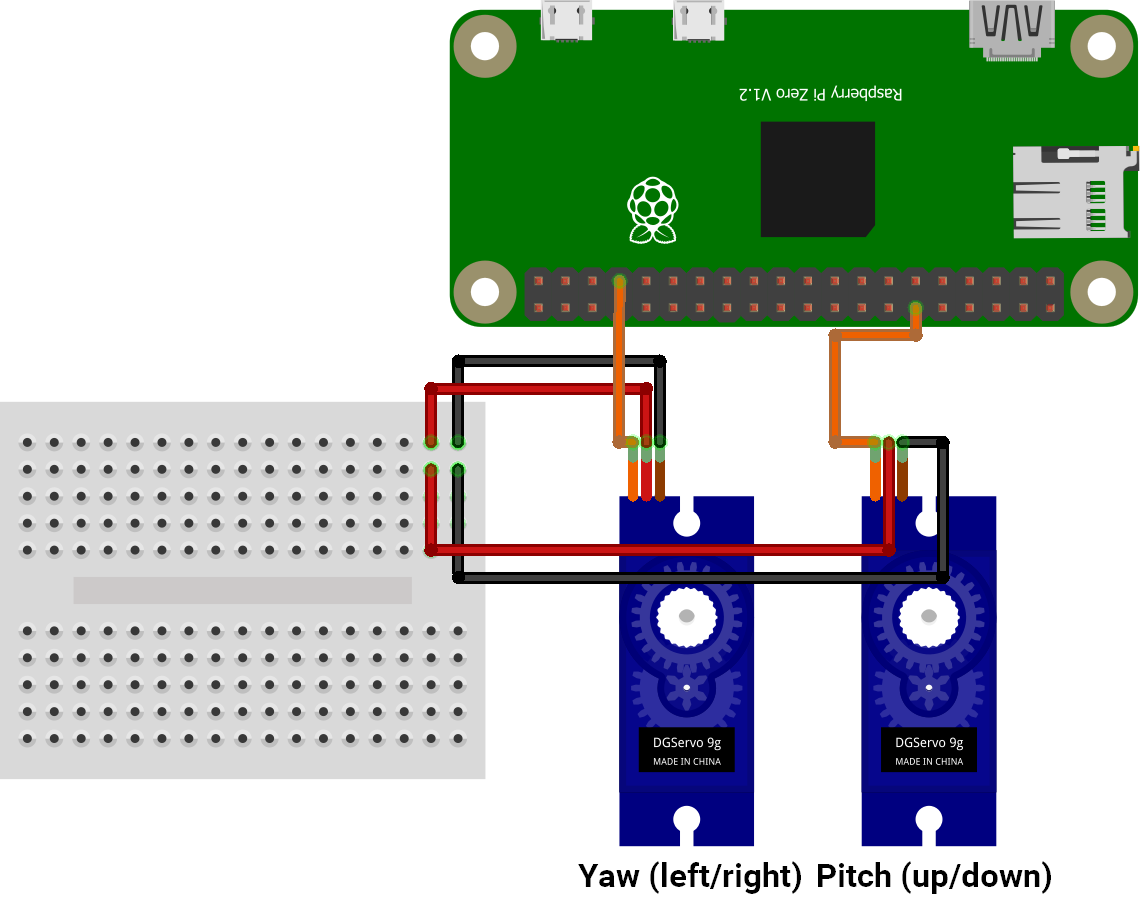
Brancher les servomoteurs comme ceci. L’emplacement des fils sur la breadboard doit correspondre à l’emplacement des piles des moteurs.
Etape 8




Connectez la caméra en écartant doucement la partie noire du connecteur, insérez le câble comme indiqué et remettez la partie noire en place. Faites de même du côté de la caméra. Le côté noir du câble doit être orienté vers le capteur de la caméra.
Avertissement
Vous devez éteindre votre Raspberry Pi avant de brancher votre caméra.
Etape 9
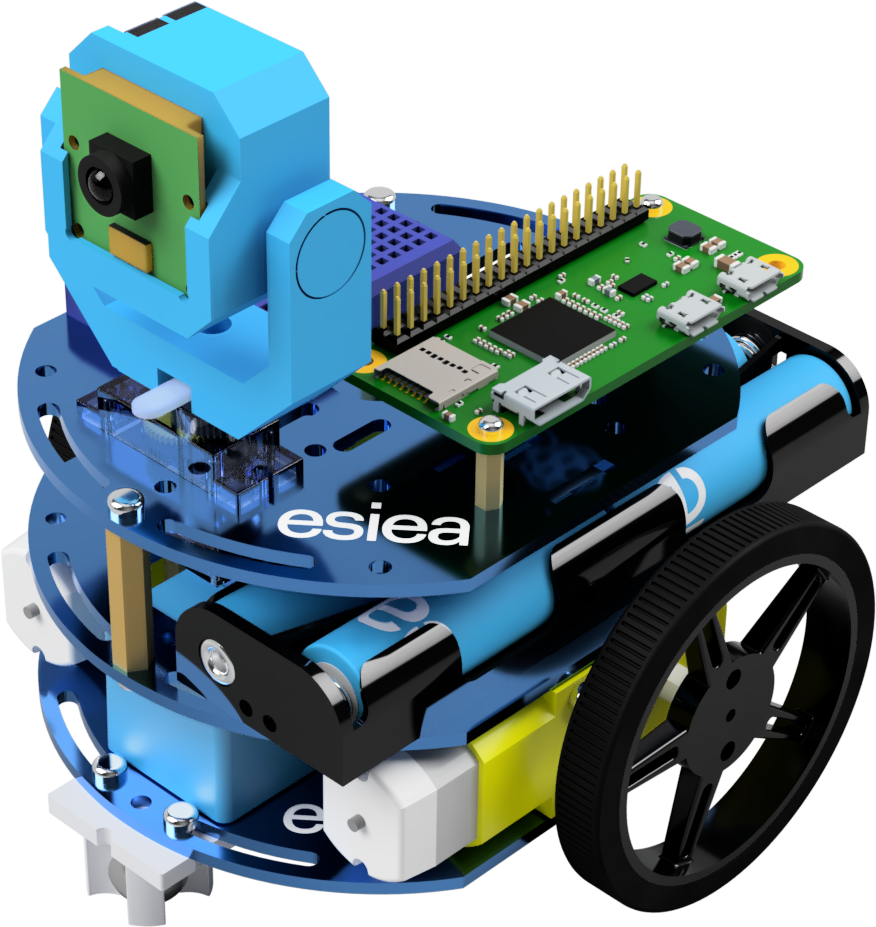
Félicitations, votre esieabot est maintenant complet !