Add-on board
Depuis 2023, l’esieabot est équipée d’une PCB dédiée pour contrôler ses moteurs. Elle ajoute également de nouveaux composants comme une LED et un bouton intégrés ou encore un convertisseur analogique/numérique.
Composants
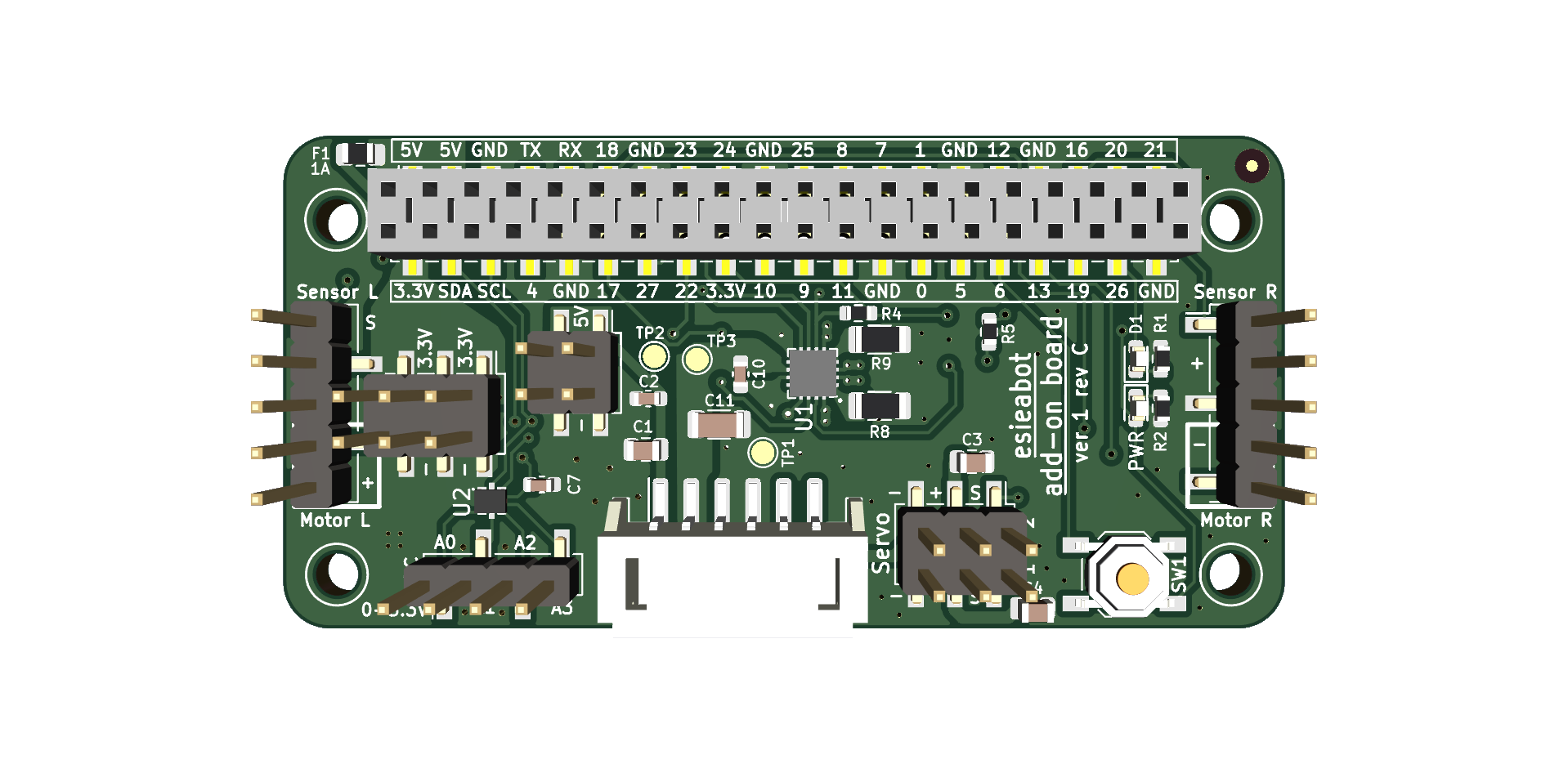
L’esieabot add-on board est équipé d’un contrôleur de moteur DRV8411 de Texas Instrument (U1) ainsi que d’un convertisseur analogique/numérique TLA2024 (U2). L’ADC est connecté sur le bus I2C du Raspberry Pi.
L’add-on board version 2 ajoute également un gyroscope et un accéléromètre 6 axes TDK ICM-42670-P (U3) qui est également connecté sur le bus I2C du Raspberry Pi.
Branchements

Les connecteurs présents sur l’add-on board sont les suivants :
1 : Connecteur JST PH2.0 à destination de la power board, pour communiquer entre les deux cartes et transmettre l’alimentation au reste du robot.
2 : Connecteur vers le Raspberry Pi, se branche sur les GPIO avec des broches d’extensions.
3 : Connecteur pour les moteurs, se branche sur les moteurs de l’esieabot. Le fil rouge sur le + et le fil noir sur le -.
4 : Connecteur pour les capteurs de vitesse. L’alimentation sur le +, la masse sur le - et le signal sur le S.
5 : Connecteur pour les servomoteurs. L’alimentation sur le +, la masse sur le - et le signal sur le S.
6 : Connecteur pour l’ADC. Des capteurs analogiques peuvent être branchés sur ce connecteur, sur une plage de tension comprise entre 0 et 3.3V.
7 : Multiprise 3.3V, à utiliser pour brancher d’autres périphériques.
8 : Multiprise 5V, à utiliser pour brancher d’autres périphériques.
Pins utilisés
L’add-on board connecte quelques composants directement aux GPIO du Raspberry Pi comme suit :
Bouton sur le GPIO 6
LED bleue sur le GPIO 26
Commandes des moteurs :
- Moteur 1 (gauche) :
GPIO 23 : direction 1 (avancer)
GPIO 25 : direction 2 (reculer)
- Moteur 2 (droite) :
GPIO 22 : direction 1 (avancer)
GPIO 17 : direction 2 (reculer)
Etat d’erreur interne : GPIO 27 (lecture seule), ce GPIO est en état logique HAUT lorsque tout va bien. Il est en état logique BAS en cas d’erreur, comme par exemple une température du controleur moteur trop élevée ou encore une surintensité
Servo moteurs sur les GPIO 13 (servo 1) et 18 (servo 2)
Capteurs de vitesse sur les GPIO 24 (capteur gauche) et 16 (capteur droit)
Avertissement
Sur l’add-on board version 1 révision C et les modèles précédents, le capteur de vitesse à gauche utilisait le GPIO 4 à la place du GPIO 24. Cela a été changé sur la révision D. Ce changement est dû au fait que le GPIO 4 du Raspberry Pi est en pull-up par défaut. Si vous possédez une de ces anciennes versions, vous devriez brancher manuellement votre capteur de vitesse à gauche sur le GPIO 24.
Tester l’add-on board
Vous pouvez lancer un programme de test pour vérifier si l’add-on board fonctionne correctement. Pour l’exécuter, utilisez la commande suivante :
/esieabot/available/official/add-on-board-test.py
Ensuite, suivez les instructions à l’écran. Si vous rencontrez des problèmes, consultez le guide de dépannage.
Note
Par défaut, l’ADC ne sera pas testé si vous n’avez pas installé le package adafruit-circuitpython-tla202x que vous pouvez installer avec la commande suivante :
pip install adafruit-circuitpython-tla202x --break-package-system