Common usage of esieabot
Charging the battery
If you are using a 2023 or newer esieabot, plug a micro USB cable to the USB port of the power board. The white CHRG LED should turn ON while charging and the green DONE LED should turn ON when fully charged.
If you are using a pre-2023 esieabot, unplug the battery and plug a micro USB cable to charge it. It should flash red while charging and turn blue when fully charged. To charge your motor’s batteries, remove them from their socket and plug a USB-C cable to charge them. They should flash red while charging and turn off when fully charged.
Choose which programs are launched at startup
In the folder “/esieabot”, there are several folders of programs. In the “/esieabot/services” folder, you will find the programs that are launched at startup in parallel.
To launch your program automatically when your esieabot starts, place your executable in the “/esieabot/services” folder. If you have any problems, the output of your program is readable in “/esieabot/logs”.
If you want to stop the current program that was started at boot time, issue the command sudo systemctl stop esieabot-manager. If you want to restart it, issue the command sudo systemctl restart esieabot-manager.
Transfer files to your esieabot
There are 3 methods to transfer files to your esieabot.
Place files directly on the SD card (not recommended)
You can turn off your esieabot and connect its SD card to your computer. You can then place all the files you want in the “esieabot” folder. This folder is then accessible on the esieabot at the path “/esieabot”. This method is not recommended because it requires turning off the Raspberry Pi before handling the SD card. It should only be used in special cases.
Access files over the network via Windows file sharing
You can connect to your esieabot’s file share using the SMB protocol, the Windows file sharing protocol. Your computer must be connected to the same network as your esieabot. To use the SMB protocol, open a file explorer and manually type the path “\\ip-of-your-esieabot\pi”. You will be asked for a username and password. These are the ones from the “samba.txt” file you previously copied. You will then arrive at the home folder of the “pi” user on your esieabot, which is the default folder you are in when you open a terminal.
Warning
It is very important to enter the username “pi” and not leave your account name as the default value. You must click the button at the bottom that allows you to enter another username. If you have saved an incorrect password, open the Windows Control Panel and go to “User Accounts” then “Manage your credentials” and finally “Windows Credentials”. Look for the line corresponding to your esieabot and click “Remove”.
Note
The SMB protocol is not always very stable, and it may be necessary to restart your Windows computer if the connection fails. If you still cannot connect after a restart, try the following file transfer method.
Access files over the network via SFTP
You can connect to your esieabot via SFTP. Your computer must be connected to the same network as your esieabot. To use the SFTP protocol, install a compatible software such as FileZilla. You can download it by clicking here. Once installed and opened, enter the following information at the top:
Host: IP address of your robot
Username: pi
Password: Password from the pi.txt file
Port: 22
You will then have access to the files on your esieabot in the middle right pane. You can drag and drop files from your computer into this window to transfer them to your esieabot. By default, you are in the “/home/pi” folder, which is the folder you are in when you open a terminal.
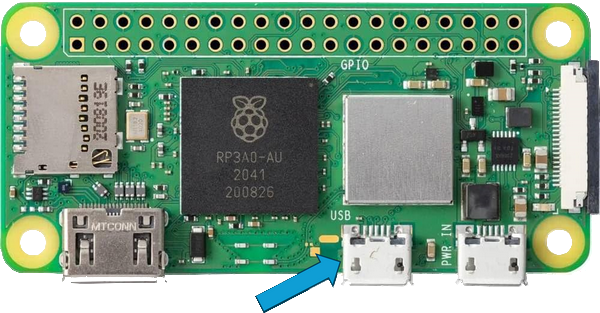
Plug a USB device
To connect a USB device on your esieabot, you must plug it in the left USB port of your Raspberry Pi Zero. The right one provided power only. You can plug and unplug a USB device at any time, without turning off your esieabot.
Connect a Bluetooth device
To connect a Bluetooth device to your esieabot, you must first enable Bluetooth. To do this, open a terminal and enter the following command: sudo systemctl start bluetooth. Then run bluetoothctl. This will open a command-line Bluetooth management utility. To connect your Bluetooth device:
Put it into pairing mode (see its manual).
In
bluetoothctl, start scanning with the command:scan on.Find your device name and note its MAC address (6 groups of 2 characters separated by “:”, for example
00:1A:7D:DA:71:13).Pair the device with the command:
pair mac_address.Connect it with the command:
connect mac_address.To allow automatic connections in the future, use the command:
trust mac_address.
If you do not perform this last step, you will need to reconnect your Bluetooth device each time using the command connect mac_address.
Note
If you cannot scan Bluetooth devices, check that Bluetooth is not blocked. To do this, enter the command rfkill list. If you see that Bluetooth is blocked, you can unblock it with the command sudo rfkill unblock bluetooth.
Update your esieabot
To update your esieabot, open a terminal on it and use the following commands:
sudo apt update
sudo apt upgrade -y
Note
This operation may take more than 20 minutes.
Warning
During the update of certain packages, you may be prompted to choose whether to keep the current configuration version or install the new version. You must choose to keep the currently installed version, otherwise you may encounter compatibility issues with esieabot programs.
Control your esieabot via Wi-Fi
Once your esieabot is connected to the same Wi-Fi network as your computer or phone (either through its internal hotspot, the ESIEA Wi-Fi network, or your personal Wi-Fi network), you can control it remotely.
To do this, go to the following address: http://your-esieabot-ip
Note
Your esieabot’s IP address is displayed on its screen if it has one. Otherwise, you can find it by running the command “ip a” on your robot. If your robot is not connected to any network and you are connected to its hotspot, the IP address is 10.42.0.1.
Once the page is open, click the “Open web controller” button. You will then access a page with 2 touch joysticks to control your esieabot. If you connected your camera, you will also get a live video stream in the background. The left joystick controls the servo motors, and the right joystick controls the drive motors.